Chapter 10. Distributed
Object-Based Systems
With this chapter, we switch
from our discussion of principles to an examination of various paradigms that
are used to organize distributed systems. The first paradigm consists of
distributed objects. In distributed object-based systems, the notion of an object
plays a key role in establishing distribution transparency. In principle,
everything is treated as an object and clients are offered services and
resources in the form of objects that they can invoke.
Distributed objects form an
important paradigm because it is relatively easy to hide distribution aspects
behind an object's interface. Furthermore, because an object can be virtually
anything, it is also a powerful paradigm for building systems. In this chapter,
we will take a look at how the principles of distributed systems are applied to
a number of well-known object-based systems. In particular, we cover aspects of
CORBA, Java-based systems, and Globe.
10.1. Architecture
Object orientation forms an
important paradigm in software development. Ever since its introduction, it has
enjoyed a huge popularity. This popularity stems from the natural ability to
build software into well-defined and more or less independent components.
Developers could concentrate on implementing specific functionality independent
from other developers.
[Page 444]
Object orientation began to
be used for developing distributed systems in the 1980s. Again, the notion of
an independent object hosted by a remote server while attaining a high degree
of distribution transparency formed a solid basis for developing a new
generation of distributed systems. In this section, we will first take a deeper
look into the general architecture of object-based distributed systems, after
which we can see how specific principles have been deployed in these systems.
10.1.1. Distributed Objects
The key feature of an object
is that it encapsulates data, called the state, and the operations on those
data, called the methods. Methods are made available through an interface. It
is important to understand that there is no "legal" way a process can
access or manipulate the state of an object other than by invoking methods made
available to it via an object's interface. An object may implement multiple
interfaces. Likewise, given an interface definition, there may be several
objects that offer an implementation for it.
This separation between
interfaces and the objects implementing these interfaces is crucial for
distributed systems. A strict separation allows us to place an interface at one
machine, while the object itself resides on another machine. This organization,
which is shown in Fig. 10-1, is commonly referred to as a distributed object.
Figure 10-1. Common
organization of a remote object with client-side proxy.

When a client binds to a
distributed object, an implementation of the object's interface, called a
proxy, is then loaded into the client's address space. A proxy is analogous to
a client stub in RPC systems. The only thing it does is marshal method
invocations into messages and unmarshal reply messages to return the result of
the method invocation to the client. The actual object resides at a server
machine, where it offers the same interface as it does on the client machine.
Incoming invocation requests are first passed to a server stub, which
unmarshals them to make method invocations at the object's interface at the
server. The server stub is also responsible for marshaling replies and
forwarding reply messages to the client-side proxy.
[Page 445]
The server-side stub is
often referred to as a skeleton as it provides the bare means for letting the
server middleware access the user-defined objects. In practice, it often
contains incomplete code in the form of a language-specific class that needs to
be further specialized by the developer.
A characteristic, but
somewhat counterintuitive feature of most distributed objects is that their
state is not distributed: it resides at a single machine. Only the interfaces
implemented by the object are made available on other machines. Such objects are
also referred to as remote objects. In a general distributed object, the state
itself may be physically distributed across multiple machines, but this
distribution is also hidden from clients behind the object's interfaces.
Compile-Time versus Runtime
Objects
Objects in distributed
systems appear in many forms. The most obvious form is the one that is directly
related to language-level objects such as those supported by Java, C++, or
other object-oriented languages, which are referred to as compile-time objects.
In this case, an object is defined as the instance of a class. A class is a
description of an abstract type in terms of a module with data elements and
operations on that data (Meyer, 1997).
Using compile-time objects
in distributed systems often makes it much easier to build distributed
applications. For example, in Java, an object can be fully defined by means of
its class and the interfaces that the class implements. Compiling the class
definition results in code that allows it to instantiate Java objects. The
interfaces can be compiled into client-side and server-side stubs, allowing the
Java objects to be invoked from a remote machine. A Java developer can be
largely unaware of the distribution of objects: he sees only Java programming
code.
The obvious drawback of
compile-time objects is the dependency on a particular programming language.
Therefore, an alternative way of constructing distributed objects is to do this
explicitly during runtime. This approach is followed in many object-based distributed
systems, as it is independent of the programming language in which distributed
applications are written. In particular, an application may be constructed from
objects written in multiple languages.
When dealing with runtime
objects, how objects are actually implemented is basically left open. For
example, a developer may choose to write a C library containing a number of
functions that can all work on a common data file. The essence is how to let
such an implementation appear to be an object whose methods can be invoked from
a remote machine. A common approach is to use an object adapter, which acts as
a wrapper around the implementation with the sole purpose to give it the
appearance of an object. The term adapter is derived from a design pattern
described in Gamma et al. (1994), which allows an interface to be converted
into something that a client expects. An example object adapter is one that
dynamically binds to the C library mentioned above and opens an associated data
file representing an object's current state.
[Page 446]
Object adapters play an
important role in object-based distributed systems. To make wrapping as easy as
possible, objects are solely defined in terms of the interfaces they implement.
An implementation of an interface can then be registered at an adapter, which
can subsequently make that interface available for (remote) invocations. The
adapter will take care that invocation requests are carried out, and thus
provide an image of remote objects to its clients. We return to the
organization of object servers and adapters later in this chapter.
Persistent and Transient
Objects
Besides the distinction
between language-level objects and runtime objects, there is also a distinction
between persistent and transient objects. A persistent object is one that
continues to exist even if it is currently not contained in the address space
of any server process. In other words, a persistent object is not dependent on
its current server. In practice, this means that the server that is currently
managing the persistent object, can store the object's state on secondary
storage and then exit. Later, a newly started server can read the object's
state from storage into its own address space, and handle invocation requests.
In contrast, a transient object is an object that exists only as long as the
server that is hosting the object. As soon as that server exits, the object
ceases to exist as well. There used to be much controversy about having
persistent objects; some people believe that transient objects are enough. To
take the discussion away from middleware issues, most object-based distributed
systems simply support both types.
10.1.2. Example: Enterprise
Java Beans
The Java programming
language and associated model has formed the foundation for numerous
distributed systems and applications. Its popularity can be attributed to the
straightforward support for object orientation, combined with the inherent
support for remote method invocation. As we will discuss later in this chapter,
Java provides a high degree of access transparency, making it easier to use
than, for example, the combination of C with remote procedure calling.
Ever since its introduction,
there has been a strong incentive to provide facilities that would ease the
development of distributed applications. These facilities go well beyond
language support, requiring a runtime environment that supports traditional
multitiered client-server architectures. To this end, much work has been put
into the development of (Enterprise) Java Beans (EJB).
[Page 447]
An EJB is essentially a Java
object that is hosted by a special server offering different ways for remote
clients to invoke that object. Crucial is that this server provides the support
to separate application functionality from systems-oriented functionality. The
latter includes functions for looking up objects, storing objects, letting
objects be part of a transaction, and so on. How this separation can be
realized is discussed below when we concentrate on object servers. How to develop
EJBs is described in detail by Monson-Hafael et al. (2004). The specifications
can be found in Sun Microsystems (2005a).
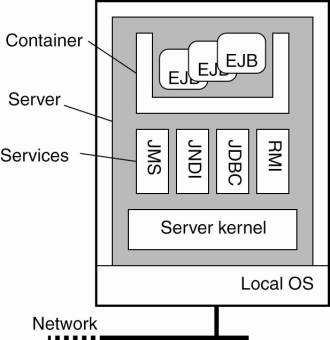
With this separation in
mind, EJBs can be pictured as shown in Fig. 10-2. The important issue is that
an EJB is embedded inside a container which effectively provides interfaces to
underlying services that are implemented by the application server. The
container can more or less automatically bind the EJB to these services,
meaning that the correct references are readily available to a programmer.
Typical services include those for remote method invocation (RMI), database
access (JDBC), naming (JNDI), and messaging (JMS). Making use of these services
is more or less automated, but does require that the programmer makes a
distinction between four kinds of EJBs:
- Stateless session beans
- Stateful session beans
- Entity beans
- Message-driven beans
Figure 10-2. General
architecture of an EJB server.
[Page 448]
As its name suggests, a
stateless session bean is a transient object that is invoked once, does its
work, after which it discards any information it needed to perform the service
it offered to a client. For example, a stateless session bean could be used to
implement a service that lists the top-ranked books. In this case, the bean
would typically consist of an SQL query that is submitted to an database. The
results would be put into a special format that the client can handle, after
which its work would have been completed and the listed books discarded.
In contrast, a stateful
session bean maintains client-related state. The canonical example is a bean
implementing an electronic shopping cart like those widely deployed for
electronic commerce. In this case, a client would typically be able to put
things in a cart, remove items, and use the cart to go to an electronic
checkout. The bean, in turn, would typically access databases for getting
current prices and information on number of items still in stock. However, its
lifetime would still be limited, which is why it is referred to as a session
bean: when the client is finished (possibly having invoked the object several
times), the bean will automatically be destroyed.
An entity bean can be
considered to be a long-lived persistent object. As such, an entity bean will
generally be stored in a database, and likewise, will often also be part of
distributed transactions. Typically, entity beans store information that may be
needed a next time a specific client access the server. In settings for
electronic commerce, an entity bean can be used to record customer information,
for example, shipping address, billing address, credit card information, and so
on. In these cases, when a client logs in, his associated entity bean will be
restored and used for further processing.
Finally, message-driven
beans are used to program objects that should react to incoming messages (and
likewise, be able to send messages). Message-driven beans cannot be invoked
directly by a client, but rather fit into a publish-subscribe way of
communication, which we briefly discussed in Chap. 4. What it boils down to is
that a message-driven bean is automatically called by the server when a
specific message m is received, to which the server (or rather an application
it is hosting) had previously subscribed. The bean contains application code
for handling the message, after which the server simply discards it.
Message-driven beans are thus seen to be stateless. We will return extensively
to this type of communication in Chap. 13.
10.1.3. Example: Globe
Distributed Shared Objects
Let us now take a look at a
completely different type of object-based distributed system. Globe is a system
in which scalability plays a central role. All aspects that deal with
constructing a large-scale wide-area system that can support huge numbers of
users and objects drive the design of Globe. Fundamental to this approach is
the way objects are viewed. Like other object-based systems, objects in Globe
are expected to encapsulate state and operations on that state.
[Page 449]
An important difference with
other object-based systems is that objects are also expected to encapsulate the
implementation of policies that prescribe the distribution of an object's state
across multiple machines. In other words, each object determines how its state
will be distributed over its replicas. Each object also controls its own
policies in other areas as well.
By and large, objects in
Globe are put in charge as much as possible. For example, an object decides
how, when, and where its state should be migrated. Also, an object decides if
its state is to be replicated, and if so, how replication should take place. In
addition, an object may also determine its security policy and implementation.
Below, we describe how such encapsulation is achieved.
Object Model
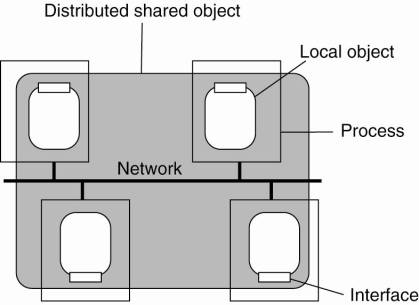
Unlike most other
object-based distributed systems, Globe does not adopt the remote-object model.
Instead, objects in Globe can be physically distributed, meaning that the state
of an object can be distributed and replicated across multiple processes. This
organization is shown in Fig. 10-3, which shows an object that is distributed
across four processes, each running on a different machine. Objects in Globe
are referred to as distributed shared objects, to reflect that objects are
normally shared between several processes. The object model originates from the
distributed objects used in Orca as described in Bal (1989). Similar approaches
have been followed for fragmented objects (Makpangou et al., 1994).
Figure 10-3. The
organization of a Globe distributed shared object.
A process that is bound to a
distributed shared object is offered a local implementation of the interfaces
provided by that object. Such a local implementation is called a local
representative, or simply local object. In principle, whether or not a local
object has state is completely transparent to the bound process. All
implementation details of an object are hidden behind the interfaces offered to
a process. The only thing visible outside the local object are its methods.
[Page 450]
Globe local objects come in
two flavors. A primitive local object is a local object that does not contain
any other local objects. In contrast, a composite local object is an object
that is composed of multiple (possibly composite) local objects. Composition is
used to construct a local object that is needed for implementing distributed
shared objects. This local object is shown in Fig. 10-4 and consists of at
least four subobjects.
Figure 10-4. The general
organization of a local object for distributed shared objects in Globe.
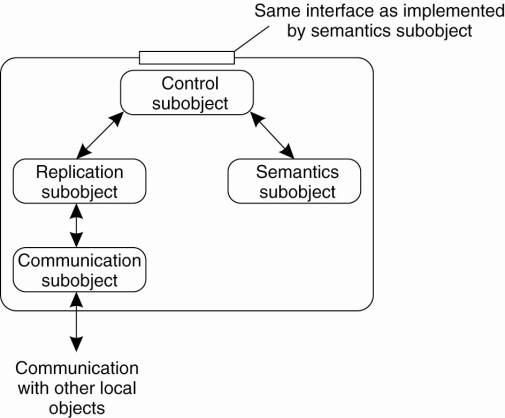
The semantics subobject
implements the functionality provided by a distributed shared object. In
essence, it corresponds to ordinary remote objects, similar in flavor to EJBs.
The communication subobject
is used to provide a standard interface to the underlying network. This
subobject offers a number of message-passing primitives for connection-oriented
as well as connectionless communication. There are also more advanced
communication subobjects available that implement multicasting interfaces.
Communication subobjects can be used that implement reliable communication,
while others offer only unreliable communication.
Crucial to virtually all
distributed shared objects is the replication subobject. This subobject
implements the actual distribution strategy for an object. As in the case of
the communication subobject, its interface is standardized. The replication
subobject is responsible for deciding exactly when a method as provided by the
semantics subobject is to be carried out. For example, a replication subobject
that implements active replication will ensure that all method invocations are
carried out in the same order at each replica. In this case, the subobject will
have to communicate with the replication subobjects in other local objects that
comprise the distributed shared object.
[Page 451]
The control subobject is
used as an intermediate between the user-defined interfaces of the semantics
subobject and the standardized interfaces of the replication subobject. In addition,
it is responsible for exporting the interfaces of the semantics subobject to
the process bound to the distributed shared object. All method invocations
requested by that process are marshaled by the control subobject and passed to
the replication subobject.
The replication subobject
will eventually allow the control subobject to carry on with an invocation
request and to return the results to the process. Likewise, invocation requests
from remote processes are eventually passed to the control subobject as well.
Such a request is then unmarshaled, after which the invocation is carried out
by the control subobject, passing results back to the replication subobject.
10.2. Processes
A key role in object-based
distributed systems is played by object servers, that is, the server designed
to host distributed objects. In the following, we first concentrate on general
aspects of object servers, after which we will discuss the open-source JBoss
server.
10.2.1. Object Servers
An object server is a server
tailored to support distributed objects. The important difference between a
general object server and other (more traditional) servers is that an object
server by itself does not provide a specific service. Specific services are
implemented by the objects that reside in the server. Essentially, the server
provides only the means to invoke local objects, based on requests from remote
clients. As a consequence, it is relatively easy to change services by simply
adding and removing objects.
An object server thus acts
as a place where objects live. An object consists of two parts: data
representing its state and the code for executing its methods. Whether or not
these parts are separated, or whether method implementations are shared by
multiple objects, depends on the object server. Also, there are differences in
the way an object server invokes its objects. For example, in a multithreaded
server, each object may be assigned a separate thread, or a separate thread may
be used for each invocation request. These and other issues are discussed next.
Alternatives for Invoking
Objects
For an object to be invoked,
the object server needs to know which code to execute, on which data it should
operate, whether it should start a separate thread to take care of the
invocation, and so on. A simple approach is to assume that all objects look
alike and that there is only one way to invoke an object. Unfortunately, such
an approach is generally inflexible and often unnecessarily constrains
developers of distributed objects.
[Page 452]
A much better approach is
for a server to support different policies. Consider, for example, transient
objects. Recall that a transient object is an object that exists only as long
as its server exists, but possibly for a shorter period of time. An in-memory,
read-only copy of a file could typically be implemented as a transient object.
Likewise, a calculator could also be implemented as a transient object. A reasonable
policy is to create a transient object at the first invocation request and to
destroy it as soon as no clients are bound to it anymore.
The advantage of this
approach is that a transient object will need a server's resources only as long
as the object is really needed. The drawback is that an invocation may take
some time to complete, because the object needs to be created first. Therefore,
an alternative policy is sometimes to create all transient objects at the time
the server is initialized, at the cost of consuming resources even when no
client is making use of the object.
In a similar fashion, a
server could follow the policy that each of its objects is placed in a memory
segment of its own. In other words, objects share neither code nor data. Such a
policy may be necessary when an object implementation does not separate code
and data, or when objects need to be separated for security reasons. In the
latter case, the server will need to provide special measures, or require
support from the underlying operating system, to ensure that segment boundaries
are not violated.
The alternative approach is
to let objects at least share their code. For example, a database containing
objects that belong to the same class can be efficiently implemented by loading
the class implementation only once into the server. When a request for an
object invocation comes in, the server need only fetch that object's state from
the database and execute the requested method.
Likewise, there are many
different policies with respect to threading. The simplest approach is to
implement the server with only a single thread of control. Alternatively, the
server may have several threads, one for each of its objects. Whenever an invocation
request comes in for an object, the server passes the request to the thread
responsible for that object. If the thread is currently busy, the request is
temporarily queued.
The advantage of this
approach is that objects are automatically protected against concurrent access:
all invocations are serialized through the single thread associated with the
object. Neat and simple. Of course, it is also possible to use a separate
thread for each invocation request, requiring that objects should have already been
protected against concurrent access. Independent of using a thread per object
or thread per method is the choice of whether threads are created on demand or
the server maintains a pool of threads. Generally there is no single best
policy. Which one to use depends on whether threads are available, how much
performance matters, and similar factors.
Object Adapter
Decisions on how to invoke
an object are commonly referred to as activation policies, to emphasize that in
many cases the object itself must first be brought into the server's address
space (i.e., activated) before it can actually be invoked. What is needed then
is a mechanism to group objects per policy. Such a mechanism is sometimes
called an object adapter, or alternatively an object wrapper. An object adapter
can best be thought of as software implementing a specific activation policy.
The main issue, however, is that object adapters come as generic components to
assist developers of distributed objects, and which need only to be configured
for a specific policy.
An object adapter has one or
more objects under its control. Because a server should be capable of
simultaneously supporting objects that require different activation policies,
several object adapters may reside in the same server at the same time. When an
invocation request is delivered to the server, that request is first dispatched
to the appropriate object adapter, as shown in Fig. 10-5.
Figure 10-5. Organization of
an object server supporting different activation policies.
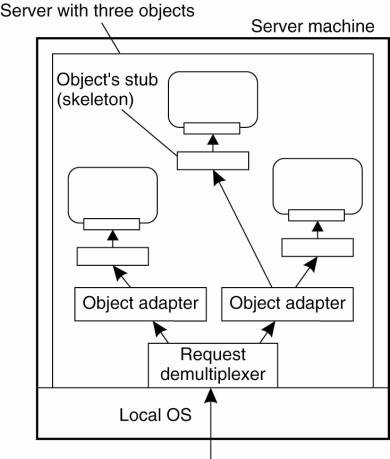
An important observation is
that object adapters are unaware of the specific interfaces of the objects they
control. Otherwise, they could never be generic. The only issue that is
important to an object adapter is that it can extract an object reference from
an invocation request, and subsequently dispatch the request to the referenced
object, but now following a specific activation policy. As is also o;lustrated
in Fig. 10-5, rather than passing the request directly to the object, an
adapter hands an invocation request to the server-side stub of that object. The
stub, also called a skeleton, is normally generated from the interface
definitions of the object, unmarshals the request and invokes the appropriate
method.
[Page 454]
An object adapter can
support different activation policies by simply configuring it at runtime. For
example, in CORBA-compliant systems (OMG, 2004a), it is possible to specify
whether an object should continue to exist after its associated adapter has
stopped. Likewise, an adapter can be configured to generate object identifiers,
or to let the application provide one. As a final example, an adapter can be
configured to operate in single-threaded or multithreaded mode as we explained
above.
As a side remark, note that
although in Fig. 10-5 we have spoken about objects, we have said nothing about
what these objects actually are. In particular, it should be stressed that as
part of the implementation of such an object the server may (indirectly) access
databases or call special library routines. The implementation details are
hidden for the object adapter who communicates only with a skeleton. As such,
the actual implementation may have nothing to do with what we often see with
language-level (i.e., compile-time) objects. For this reason, a different
terminology is generally adopted. A servant is the general term for a piece of
code that forms the implementation of an object. In this light, a Java bean can
be seen as nothing but just another kind of servant.
10.2.2. Example: The Ice
Runtime System
Let us take a look at how
distributed objects are handled in practice. We briefly consider the Ice
distributed-object system, which has been partly developed in response to the
intricacies of commercial object-based distributed systems (Henning, 2004). In
this section, we concentrate on the core of an Ice object server and defer
other parts of the system to later sections.
An object server in Ice is
nothing but an ordinary process that simply starts with initializing the Ice
runtime system (RTS). The basis of the runtime environment is formed by what is
called a communicator. A communicator is a component that manages a number of
basic resources, of which the most important one is formed by a pool of
threads. Likewise, it will have associated dynamically allocated memory, and so
on. In addition, a communicator provides the means for configuring the
environment. For example, it is possible to specify maximum message lengths,
maximum invocation retries, and so on.
Normally, an object server
would have only a single communicator. However, when different applications
need to be fully separated and protected from each other, a separate
communicator (with possibly a different configuration) can be created within
the same process. At the very least, such an approach would separate the
different thread pools so that if one application has consumed all its threads,
then this would not affect the other application.
[Page 455]
A communicator can also be
used to create an object adapter, such as shown in Fig. 10-6. We note that the
code is simplified and incomplete. More examples and detailed information on
Ice can be found in Henning and Spruiell (2005).
Figure 10-6. Example of
creating an object server in Ice.
|
main(int argc,
char* argv[]) { Ice::Communicator ic; Ice::ObjectAdapter adapter; Ice::Object object; ic = Ice::initialize(argc, argv); adapter = ic->createObjectAdapterWithEnd
Points( "MyAdapter","tcp -p 10000"); object = new MyObject; adapter->add(object, objectID); adapter->activate(); ic->waitForShutdown(); } |
In this example, we start
with creating and initializing the runtime environment. When that is done, an
object adapter is created. In this case, it is instructed to listen for
incoming TCP connections on port 10000. Note that the adapter is created in the
context of the just created communicator. We are now in the position to create
an object and to subsequently add that object to the adapter. Finally, the
adapter is activated, meaning that, under the hood, a thread is activated that
will start listening for incoming requests.
This code does not yet show
much differentiation in activation policies. Policies can be changed by modifying
the properties of an adapter. One family of properties is related to
maintaining an adapter-specific set of threads that are used for handling
incoming requests. For example, one can specify that there should always be
only one thread, effectively serializing all accesses to objects that have been
added to the adapter.
Again, note that we have not
specified MyObject. Like before, this could be a simple C++ object, but also
one that accesses databases and other external services that jointly implement
an object. By registering MyObject with an adapter, such implementation details
are completely hidden from clients, who now believe that they are invoking a
remote object.
In the example above, an
object is created as part of the application, after which it is added to an
adapter. Effectively, this means that an adapter may need to support many
objects at the same time, leading to potential scalability problems. An
alternative solution is to dynamically load objects into memory when they are
needed. To do this, Ice provides support for special objects known as locators.
A locator is called when the adapter receives an incoming request for an object
that has not been explicitly added. In that case, the request is forwarded to
the locator, whose job is to further handle the request.
[Page 456]
To make matters more
concrete, suppose a locator is handed a request for an object of which the
locator knows that its state is stored in a relational database system. Of
course, there is no magic here: the locator has been programmed explicitly to
handle such requests. In this case, the object's identifier may correspond to
the key of a record in which that state is stored. The locator will then simply
do a lookup on that key, fetch the state, and will then be able to further
process the request.
There can be more than one
locator added to an adapter. In that case, the adapter would keep track of
which object identifiers would belong to the same locator. Using multiple
locators allows supporting many objects by a single adapter. Of course, objects
(or rather their state) would need to be loaded at runtime, but this dynamic
behavior would possibly make the server itself relatively simple.
10.3. Communication
We now draw our attention to
the way communication is handled in object-based distributed systems. Not
surprisingly, these systems generally offer the means for a remote client to
invoke an object. This mechanism is largely based on remote procedure calls
(RPCs), which we discussed extensively in Chap. 4. However, before this can
happen, there are numerous issues that need to be dealt with.
10.3.1. Binding a Client to
an Object
An interesting difference
between traditional RPC systems and systems supporting distributed objects is
that the latter generally provides systemwide object references. Such object
references can be freely passed between processes on different machines, for
example as parameters to method invocations. By hiding the actual
implementation of an object reference, that is, making it opaque, and perhaps
even using it as the only way to reference objects, distribution transparency
is enhanced compared to traditional RPCs.
When a process holds an
object reference, it must first bind to the referenced object before invoking
any of its methods. Binding results in a proxy being placed in the process's
address space, implementing an interface containing the methods the process can
invoke. In many cases, binding is done automatically. When the underlying
system is given an object reference, it needs a way to locate the server that
manages the actual object, and place a proxy in the client's address space.
With implicit binding, the
client is offered a simple mechanism that allows it to directly invoke methods
using only a reference to an object. For example, C++ allows overloading the
unary member selection operator ("![]() ")
permitting us to introduce object references as if they were ordinary pointers
as shown in Fig. 10-7(a). With implicit binding, the client is transparently
bound to the object at the moment the reference is resolved to the actual
object. In contrast, with explicit binding, the client should first call a
special function to bind to the object before it can actually invoke its
methods. Explicit binding generally returns a pointer to a proxy that is then
become locally available, as shown in Fig. 10-7(b).
")
permitting us to introduce object references as if they were ordinary pointers
as shown in Fig. 10-7(a). With implicit binding, the client is transparently
bound to the object at the moment the reference is resolved to the actual
object. In contrast, with explicit binding, the client should first call a
special function to bind to the object before it can actually invoke its
methods. Explicit binding generally returns a pointer to a proxy that is then
become locally available, as shown in Fig. 10-7(b).
[Page 457]
Figure 10-7. (a) An example
with implicit binding using only global references. (b) An example with
explicit binding using global and local references.
|
Distr_object*
obj_ref; // Declare a systemwide
object reference obj_ref = ...; // Initialize the reference to
a distrib. obj. obj_refdo_something(
); // Implicitly bind and invoke a
method (a) Distr_object
obj_ref; // Declare a systemwide
object reference Local_object*
obj_ptr; // Declare a pointer to local objects obj_ref = ...; // Initialize the reference to a
distrib. obj. obj_ptr =
bind(obj_ref); // Explicitly bind and
get ptr to local proxy obj_ptrdo_something(
); // Invoke a method on the local
proxy (b) |
Implementation of Object
References
It is clear that an object
reference must contain enough information to allow a client to bind to an
object. A simple object reference would include the network address of the
machine where the actual object resides, along with an end point identifying
the server that manages the object, plus an indication of which object. Note
that part of this information will be provided by an object adapter. However,
there are a number of drawbacks to this scheme.
First, if the server's
machine crashes and the server is assigned a different end point after
recovery, all object references have become invalid. This problem can be solved
as is done in DCE: have a local daemon per machine listen to a well-known end
point and keep track of the server-to-end point assignments in an end point
table. When binding a client to an object, we first ask the daemon for the
server's current end point. This approach requires that we encode a server ID
into the object reference that can be used as an index into the end point
table. The server, in turn, is always required to register itself with the
local daemon.
However, encoding the
network address of the server's machine into an object reference is not always
a good idea. The problem with this approach is that the server can never move
to another machine without invalidating all the references to the objects it
manages. An obvious solution is to expand the idea of a local daemon
maintaining an end point table to a location server that keeps track of the
machine where an object's server is currently running. An object reference
would then contain the network address of the location server, along with a
systemwide identifier for the server. Note that this solution comes close to
implementing flat name spaces as we discussed in Chap. 5.
[Page 458]
What we have tacitly assumed
so far is that the client and server have somehow already been configured to
use the same protocol stack. Not only does this mean that they use the same
transport protocol, for example, TCP; furthermore it means that they use the same
protocol for marshaling and unmarshaling parameters. They must also use the
same protocol for setting up an initial connection, handle errors and flow
control the same way, and so on.
We can safely drop this
assumption provided we add more information in the object reference. Such
information may include the identification of the protocol that is used to bind
to an object and of those that are supported by the object's server. For
example, a single server may simultaneously support data coming in over a TCP
connection, as well as incoming UDP datagrams. It is then the client's
responsibility to get a proxy implementation for at least one of the protocols
identified in the object reference.
We can even take this
approach one step further, and include an implementation handle in the object
reference, which refers to a complete implementation of a proxy that the client
can dynamically load when binding to the object. For example, an implementation
handle could take the form of a URL pointing to an archive file, such as
ftp://ftp.clientware.org/proxies/java/proxy-v1.1a.zip. The binding protocol
would then only need to prescribe that such a file should be dynamically
downloaded, unpacked, installed, and subsequently instantiated. The benefit of
this approach is that the client need not worry about whether it has an
implementation of a specific protocol available. In addition, it gives the
object developer the freedom to design object-specific proxies. However, we do
need to take special security measures to ensure the client that it can trust
the downloaded code.
10.3.2. Static versus
Dynamic Remote Method Invocations
After a client is bound to
an object, it can invoke the object's methods through the proxy. Such a remote
method invocation, or simply RMI, is very similar to an RPC when it comes to
issues such as marshaling and parameter passing. An essential difference
between an RMI and an RPC is that RMIs generally support systemwide object
references as explained above. Also, it is not necessary to have only general-purpose
client-side and server-side stubs available. Instead, we can more easily
accommodate object-specific stubs as we also explained.
The usual way to provide RMI
support is to specify the object's interfaces in an interface definition
language, similar to the approach followed with RPCs. Alternatively, we can
make use of an object-based language such as Java, that will handle stub
generation automatically. This approach of using predefined interface
definitions is generally referred to as static invocation. Static invocations
require that the interfaces of an object are known when the client application
is being developed. It also implies that if interfaces change, then the client
application must be recompiled before it can make use of the new interfaces.
[Page 459]
As an alternative, method
invocations can also be done in a more dynamic fashion. In particular, it is
sometimes convenient to be able to compose a method invocation at runtime, also
referred to as a dynamic invocation. The essential difference with static
invocation is that an application selects at runtime which method it will
invoke at a remote object. Dynamic invocation generally takes a form such as
invoke(object,
method, input_parameters, output_parameters);
where object identifies the
distributed object, method is a parameter specifying exactly which method
should be invoked, input_parameters is a data structure that holds the values
of that method's input parameters, and output_parameters refers to a data
structure where output values can be stored.
For example, consider
appending an integer int to a file object fobject, for which the object
provides the method append. In this case, a static invocation would take the
form
fobject.append(int)
whereas the dynamic
invocation would look something like
invoke(fobject,
id(append), int)
where the operation
id(append) returns an identifier for the method append.
To illustrate the usefulness
of dynamic invocations, consider an object browser that is used to examine sets
of objects. Assume that the browser supports remote object invocations. Such a
browser is capable of binding to a distributed object and subsequently
presenting the object's interface to its user. The user could then be asked to
choose a method and provide values for its parameters, after which the browser
can do the actual invocation. Typically, such an object browser should be
developed to support any possible interface. Such an approach requires that
interfaces can be inspected at runtime, and that method invocations can be
dynamically constructed.
Another application of
dynamic invocations is a batch processing service to which invocation requests
can be handed along with a time when the invocation should be done. The service
can be implemented by a queue of invocation requests, ordered by the time that
invocations are to be done. The main loop of the service would simply wait
until the next invocation is scheduled, remove the request from the queue, and
call invoke as given above.
[Page 460]
10.3.3. Parameter Passing
Because most RMI systems
support systemwide object references, passing parameters in method invocations
is generally less restricted than in the case of RPCs. However, there are some
subtleties that can make RMIs trickier than one might initially expect, as we
briefly discuss in the following pages.
Let us first consider the
situation that there are only distributed objects. In other words, all objects
in the system can be accessed from remote machines. In that case, we can
consistently use object references as parameters in method invocations.
References are passed by value, and thus copied from one machine to the other.
When a process is given an object reference as the result of a method
invocation, it can simply bind to the object referred to when needed later.
Unfortunately, using only
distributed objects can be highly inefficient, especially when objects are
small, such as integers, or worse yet, Booleans. Each invocation by a client
that is not colocated in the same server as the object, generates a request between
different address spaces or, even worse, between different machines. Therefore,
references to remote objects and those to local objects are often treated
differently.
When invoking a method with
an object reference as parameter, that reference is copied and passed as a
value parameter only when it refers to a remote object. In this case, the
object is literally passed by reference. However, when the reference refers to
a local object, that is an object in the same address space as the client, the
referred object is copied as a whole and passed along with the invocation. In
other words, the object is passed by value.
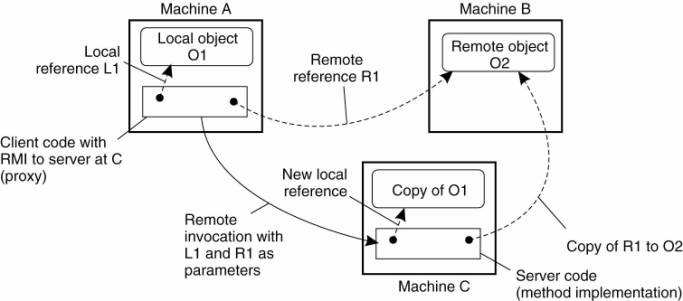
These two situations are
illustrated in Fig. 10-8, which shows a client program running on machine A,
and a server program on machine C. The client has a reference to a local object
O 1 that it uses as a parameter when calling the server program on machine C.
In addition, it holds a reference to a remote object O 2 residing at machine B,
which is also used as a parameter. When calling the server, a copy of O 1 is
passed to the server on machine C, along with only a copy of the reference to O
2.
Figure 10-8. The situation
when passing an object by reference or by value.
(This item is displayed on
page 461 in the print version)
Note that whether we are
dealing with a reference to a local object or a reference to a remote object
can be highly transparent, such as in Java. In Java, the distinction is visible
only because local objects are essentially of a different data type than remote
objects. Otherwise, both types of references are treated very much the same
[see also Wollrath et al. (1996)]. On the other hand, when using conventional
programming languages such as C, a reference to a local object can be as simple
as a pointer, which can never be used to refer to a remote object.
The side effect of invoking
a method with an object reference as parameter is that we may be copying an
object. Obviously, hiding this aspect is unacceptable, so that we are
consequently forced to make an explicit distinction between local and
distributed objects. Clearly, this distinction not only violates distribution
transparency, but also makes it harder to write distributed applications.
10.3.4. Example: Java RMI
In Java, distributed objects
have been integrated into the language. An important goal was to keep as much
of the semantics of nondistributed objects as possible. In other words, the
Java language developers have aimed for a high degree of distribution transparency.
However, as we shall see, Java's developers have also decided to make
distribution apparent where a high degree of transparency was simply too
inefficient, difficult, or impossible to realize.
The Java Distributed-Object
Model
Java also adopts remote objects
as the only form of distributed objects. Recall that a remote object is a
distributed object whose state always resides on a single machine, but whose
interfaces can be made available to remote processes. Interfaces are
implemented in the usual way by means of a proxy, which offers exactly the same
interfaces as the remote object. A proxy itself appears as a local object in
the client's address space.
There are only a few, but
subtle and important, differences between remote objects and local objects.
First, cloning local or remote objects are different. Cloning a local object O
results in a new object of the same type as O with exactly the same state.
Cloning thus returns an exact copy of the object that is cloned. These
semantics are hard to apply to a remote object. If we were to make an exact
copy of a remote object, we would not only have to clone the actual object at
its server, but also the proxy at each client that is currently bound to the
remote object. Cloning a remote object is therefore an operation that can be
executed only by the server. It results in an exact copy of the actual object
in the server's address space. Proxies of the actual object are thus not
cloned. If a client at a remote machine wants access to the cloned object at the
server, it will first have to bind to that object again.
Java Remote Object
Invocation
As the distinction between
local and remote objects is hardly visible at the language level, Java can also
hide most of the differences during a remote method invocation. For example,
any primitive or object type can be passed as a parameter to an RMI, provided
only that the type can be marshaled. In Java terminology, this means that it
must be serializable. Although, in principle, most objects can be serialized,
serialization is not always allowed or possible. Typically, platform-dependent
objects such as file descriptors and sockets, cannot be serialized.
The only distinction made
between local and remote objects during an RMI is that local objects are passed
by value (including large objects such as arrays), whereas remote objects are
passed by reference. In other words, a local object is first copied after which
the copy is used as parameter value. For a remote object, a reference to the
object is passed as parameter instead of a copy of the object, as was also
shown in Fig. 10-8.
In Java RMI, a reference to
a remote object is essentially implemented as we explained in Sec. 10.3.3. Such
a reference consists of the network address and end point of the server, as
well as a local identifier for the actual object in the server's address space.
That local identifier is used only by the server. As we also explained, a
reference to a remote object also needs to encode the protocol stack that is
used by a client and the server to communicate. To understand how such a stack
is encoded in the case of Java RMI, it is important to realize that each object
in Java is an instance of a class. A class, in turn, contains an implementation
of one or more interfaces.
In essence, a remote object
is built from two different classes. One class contains an implementation of
server-side code, which we call the server class. This class contains an
implementation of that part of the remote object that will be running on a
server. In other words, it contains the description of the object's state, as
well as an implementation of the methods that operate on that state. The
server-side stub, that is, the skeleton, is generated from the interface
specifications of the object.
The other class contains an
implementation of the client-side code, which we call the client class. This
class contains an implementation of a proxy. Like the skeleton, this class is
also generated from the object's interface specification. In its simplest form,
the only thing a proxy does is to convert each method call into a message that
is sent to the server-side implementation of the remote object, and convert a
reply message into the result if a method call. For each call, it sets up a
connection with the server, which is subsequently torn down when the call is
finished. For this purpose, the proxy needs the server's network address and
end point as mentioned above. This information, along with the local identifier
of the object at the server, is always stored as part of the state of a proxy.
[Page 463]
Consequently, a proxy has
all the information it needs to let a client invoke methods of the remote
object. In Java, proxies are serializable. In other words, it is possible to
marshal a proxy and send it as a series of bytes to another process, where it
can be unmarshaled and used to invoke methods on the remote object. In other
words, a proxy can be used as a reference to a remote object.
This approach is consistent
with Java's way of integrating local and distributed objects. Recall that in an
RMI, a local object is passed by making a copy of it, while a remote object is
passed by means of a systemwide object reference. A proxy is treated as nothing
else but a local object. Consequently, it is possible to pass a serializable
proxy as parameter in an RMI. The side effect is that such a proxy can be used
as a reference to the remote object.
In principle, when
marshaling a proxy, its complete implementation, that is, all its state and
code, is converted to a series of bytes. Marshaling the code like this is not
very efficient and may lead to very large references. Therefore, when
marshaling a proxy in Java, what actually happens is that an implementation
handle is generated, specifying precisely which classes are needed to construct
the proxy. Possibly, some of these classes first need to be downloaded from a
remote site. The implementation handle replaces the marshaled code as part of a
remote-object reference. In effect, references to remote objects in Java are in
the order of a few hundred bytes.
This approach to referencing
remote objects is highly flexible and is one of the distinguishing features of
Java RMI (Waldo, 1998). In particular, it allows for object-specific solutions.
For example, consider a remote object whose state changes only once in a while.
We can turn such an object into a truly distributed object by copying the
entire state to a client at binding time. Each time the client invokes a
method, it operates on the local copy. To ensure consistency, each invocation
also checks whether the state at the server has changed, in which case the
local copy is refreshed. Likewise, methods that modify the state are forwarded
to the server. The developer of the remote object will now have to implement
only the necessary client-side code, and have it dynamically downloaded when
the client binds to the object.
Being able to pass proxies
as parameters works only because each process is executing the same Java
virtual machine. In other words, each process is running in the same execution
environment. A marshaled proxy is simply unmarshaled at the receiving side, after
which its code can be executed. In contrast, in DCE for example, passing stubs
is out of the question, as different processes may be running in execution
environments that differ with respect to language, operating system, and
hardware. Instead, a DCE process first needs to (dynamically) link in a
locally-available stub that has been previously compiled specifically for the
process's execution environment. By passing a reference to a stub as parameter
in an RPC, it is possible to refer to objects across process boundaries.
10.3.5. Object-Based
Messaging
Although RMI is the
preferred way of handling communication in object-based distributed systems,
messaging has also found its way as an important alternative. There are various
object-based messaging systems available, and, as can be expected, offer very
much the same functionality. In this section we will take a closer look at
CORBA messaging, partly because it also provides an interesting way of
combining method invocation and message-oriented communication.
CORBA is a well-known
specification for distributed systems. Over the years, several implementations
have come to existence, although it remains to be seen to what extent CORBA
itself will ever become truly popular. However, independent of popularity, the
CORBA specifications are comprehensive (which to many also means they are very
complex). Recognizing the popularity of messaging systems, CORBA was quick to
include a specification of a messaging service.
What makes messaging in
CORBA different from other systems is its inherent object-based approach to
communication. In particular, the designers of the messaging service needed to
retain the model that all communication takes place by invoking an object. In
the case of messaging, this design constraint resulted in two forms of
asynchronous method invocations (in addition to other forms that were provided
by CORBA as well).
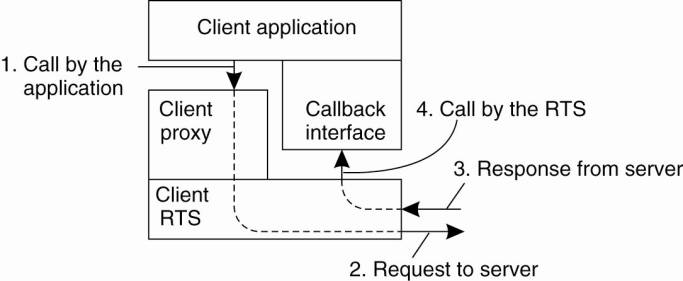
An asynchronous method
invocation is analogous to an asynchronous RPC: the caller continues after
initiating the invocation without waiting for a result. In CORBA's callback
model, a client provides an object that implements an interface containing
callback methods. These methods can be called by the underlying communication
system to pass the result of an asynchronous invocation. An important design
issue is that asynchronous method invocations do not affect the original
implementation of an object. In other words, it is the client's responsibility
to transform the original synchronous invocation into an asynchronous one; the
server is presented with a normal (synchronous) invocation request.
Constructing an asynchronous
invocation is done in two steps. First, the original interface as implemented
by the object is replaced by two new interfaces that are to be implemented by
client-side software only. One interface contains the specification of methods
that the client can call. None of these methods returns a value or has any
output parameter. The second interface is the callback interface. For each
operation in the original interface, it contains a method that will be called
by the client's runtime system to pass the results of the associated method as
called by the client.
As an example, consider an
object implementing a simple interface with just one method:
int add(in int i, in
int j, out int k);
Assume that this method
takes two nonnegative integers i and j and returns i + j as output parameter k.
The operation is assumed to return-1 if the operation did not complete
successfully. Transforming the original (synchronous) method invocation into an
asynchronous one with callbacks is achieved by first generating the following
pair of method specifications (for our purposes, we choose convenient names
instead of following the strict rules as specified in OMG (2004a):
[Page 465]
void sendcb_add(in
int i, in int j); // Downcall by the
client
void replycb_add(in
int ret_val, in int k); // Upcall to the
client
In effect, all output
parameters from the original method specification are removed from the method
that is to be called by the client, and returned as input parameters of the
callback operations. Likewise, if the original method specified a return value,
that value is passed as an input parameter to the callback operation.
The second step consists of
compiling the generated interfaces. As a result, the client is offered a stub
that allows it to asynchronously invoke sendcb_add. However, the client will
need to provide an implementation for the callback interface, in our example
containing the method replycb_add. This last method is called by the client's
local runtime system (RTS), resulting in an upcall to the client application.
Note that these changes do not affect the server-side implementation of the
object. Using this example, the callback model is summarized in Fig. 10-9.
Figure 10-9. CORBA's
callback model for asynchronous method invocation.
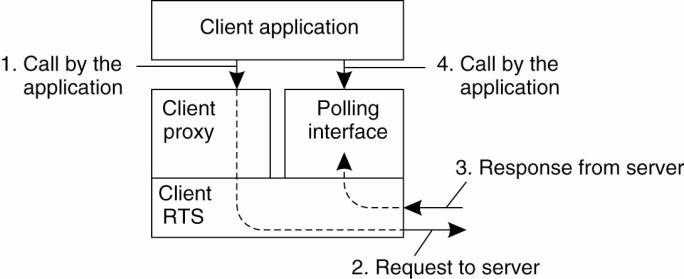
As an alternative to
callbacks, CORBA provides a polling model. In this model, the client is offered
a collection of operations to poll its local RTS for incoming results. As in
the callback model, the client is responsible for transforming the original
synchronous method invocations into asynchronous ones. Again, most of the work
can be done by automatically deriving the appropriate method specifications
from the original interface as implemented by the object.
Returning to our example,
the method add will lead to the following two generated method specifications
(again, we conveniently adopt our own naming conventions):
void sendpoll_add(in
int i, in int j); // Called by the client
void
replypoll_add(out int ret_val, out int k); //
Also called by the client
[Page 466]
The most important
difference between the polling and callback models is that the method
replypoll_add will have to be implemented by the client's RTS. This
implementation can be automatically generated from interface specifications,
just as the client-side stub is automatically generated as we explained for
RPCs. The polling model is summarized in Fig. 10-10. Again, notice that the
implementation of the object as it appears at the server's side does not have
to be changed.
Figure 10-10. CORBA's
polling model for asynchronous method invocation.
What is missing from the
models described so far is that the messages sent between a client and a
server, including the response to an asynchronous invocation, are stored by the
underlying system in case the client or server is not yet running. Fortunately,
most of the issues concerning such persistent communication do not affect the
asynchronous invocation model discussed so far. What is needed is to set up a
collection of message servers that will allow messages (be they invocation
requests or responses), to be temporarily stored until their delivery can take
place.
To this end, the CORBA
specifications also include interface definitions for what are called routers,
which are analogous to the message routers we discussed in Chap. 4, and which
can be implemented, for example, using IBM's WebSphere queue managers.
Likewise, Java has its own
Java Messaging Service (JMS) which is again very similar to what we have
discussed before [see Sun Microsystems (2004a)]. We will return to messaging
more extensively in Chap. 13 when we discuss the publish/subscribe paradigm.
10.4. Naming
The interesting aspect of
naming in object-based distributed systems evolves around the way that object
references are supported. We already described these object references in the
case of Java, where they effectively correspond to portable proxy
implementations. However, this a language-dependent way of being able to refer
to remote objects. Again taking CORBA as an example, let us see how basic
naming can also be provided in a language and platform-independent way. We also
discuss a completely different scheme, which is used in the Globe distributed
system.
[Page 467]
10.4.1. CORBA Object
References
Fundamental to CORBA is the
way its objects are referenced. When a client holds an object reference, it can
invoke the methods implemented by the referenced object. It is important to
distinguish the object reference that a client process uses to invoke a method,
and the one implemented by the underlying RTS.
A process (be it client or
server) can use only a language-specific implementation of an object reference.
In most cases, this takes the form of a pointer to a local representation of
the object. That reference cannot be passed from process A to process B, as it
has meaning only within the address space of process A. Instead, process A will
first have to marshal the pointer into a process-independent representation.
The operation to do so is provided by its RTS. Once marshaled, the reference
can be passed to process B, which can unmarshal it again. Note that processes A
and B may be executing programs written in different languages.
In contrast, the underlying
RTS will have its own language-independent representation of an object
reference. This representation may even differ from the marshaled version it
hands over to processes that want to exchange a reference. The important thing
is that when a process refers to an object, its underlying RTS is implicitly
passed enough information to know which object is actually being referenced.
Such information is normally passed by the client and server-side stubs that
are generated from the interface specifications of an object.
One of the problems that
early versions of CORBA had was that each implementation could decide on how it
represented an object reference. Consequently, if process A wanted to pass a
reference to process B as described above, this would generally succeed only if
both processes were using the same CORBA implementation. Otherwise, the
marshaled version of the reference held by process A would be meaningless to
the RTS used by process B.
Current CORBA systems all
support the same language-independent representation of an object reference,
which is called an Interoperable Object Reference or IOR. Whether or not a
CORBA implementation uses IORs internally is not all that important. However,
when passing an object reference between two different CORBA systems, it is
passed as an IOR. An IOR contains all the information needed to identify an
object. The general layout of an IOR is shown in Fig. 10-11, along with
specific information for the communication protocol used in CORBA.
Figure 10-11. The
organization of an IOR with specific information for IIOP.
(This item is displayed on
page 468 in the print version)
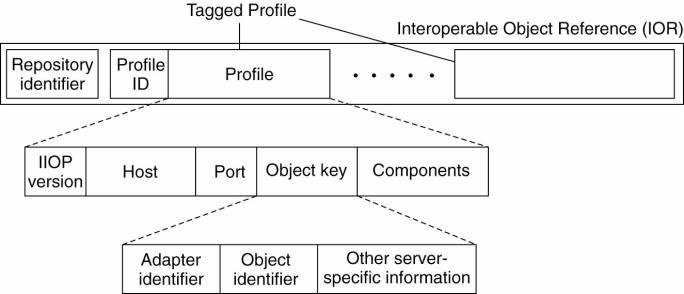
Each IOR starts with a
repository identifier. This identifier is assigned to an interface so that it
can be stored and looked up in an interface repository. It is used to retrieve
information on an interface at runtime, and can assist in, for example, type
checking or dynamically constructing an invocation. Note that if this
identifier is to be useful, both the client and server must have access to the
same interface repository, or at least use the same identifier to identify
interfaces.
[Page 468]
The most important part of
each IOR is formed by what are called tagged profiles. Each such profile
contains the complete information to invoke an object. If the object server
supports several protocols, information on each protocol can be included in a
separate tagged profile. CORBA used the Internet Inter-ORB Protocol (IIOP) for
communication between nodes. (An ORB or Object Request Broker is the name used
by CORBA for their object-based runtime system.) IIOP is essentially a
dedicated protocol for supported remote method invocations. Details on the
profile used for IIOP are also shown in Fig. 10-11.
The IIOP profile is
identified by a ProfileID field in the tagged profile. Its body consists of
five fields. The IIOP version field identifies the version of IIOP that is used
in this profile.
The Host field is a string
identifying exactly on which host the object is located. The host can be
specified either by means of a complete DNS domain name (such as
soling.cs.vu.nl), or by using the string representation of that host's IP
address, such as 130.37.24.11.
The Port field contains the
port number to which the object's server is listening for incoming requests.
The Object key field
contains server-specific information for demultiplexing incoming requests to
the appropriate object. For example, an object identifier generated by a CORBA
object adapter will generally be part of such an object key. Also, this key
will identify the specific adapter.
Finally, there is a
Components field that optionally contains more information needed for properly
invoking the referenced object. For example, this field may contain security
information indicating how the reference should be handled, or what to do in
the case the referenced server is (temporarily) unavailable.
10.4.2. Globe Object
References
Let us now take a look at a
different way of referencing objects. In Globe, each distributed shared object
is assigned a globally unique object identifier (OID), which is a 256-bit
string. A Globe OID is a true identifier as defined in Chap. 5. In other words,
a Globe OID refers to at most one distributed shared object; it is never reused
for another object; and each object has at most one OID.
Globe OIDs can be used only
for comparing object references. For example, suppose processes A and B are
each bound to a distributed shared object. Each process can request the OID of
the object they are bound to. If and only if the two OIDs are the same, then A
and B are considered to be bound to the same object.
Unlike CORBA references,
Globe OIDs cannot be used to directly contact an object. Instead, to locate an
object, it is necessary to look up a contact address for that object in a
location service. This service returns a contact address, which is comparable
to the location-dependent object references as used in CORBA and other
distributed systems. Although Globe uses its own specific location service, in
principle any of the location services discussed in Chap. 5 would do.
Ignoring some minor details,
a contact address has two parts. The first one is an address identifier by
which the location service can identify the proper leaf node to which insert or
delete operations for the associated contact address are to forwarded. Recall
that because contact addresses are location dependent, it is important to insert
and delete them starting at an appropriate leaf node.
The second part consists of
actual address information, but this information is completely opaque to the
location service. To the location service, an address is just an array of bytes
that can equally stand for an actual network address, a marshaled interface
pointer, or even a complete marshaled proxy.
Two kinds of addresses are
currently supported in Globe. A stacked address represents a layered protocol
suite, where each layer is represented by the three-field record shown in Fig.
10-12.
Figure 10-12. The
representation of a protocol layer in a stacked contact address.
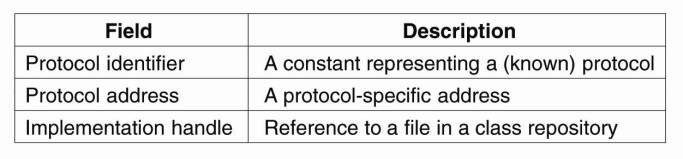
The Protocol identifier is a
constant representing a known protocol. Typical protocol identifiers include
TCP, UDP, and IP. The Protocol address field contains a protocol-specific
address, such as TCP port number, or an IPv4 network address. Finally, an Implementation
handle can be optionally provided to indicate where a default implementation
for the protocol can be found. Typically, an implementation handle is
represented as a URL.
[Page 470]
The second type of contact
address is an instance address, which consists of the two fields shown in Fig.
10-13. Again, the address contains an implementation handle, which is nothing
but a reference to a file in a class repository where an implementation of a
local object can be found. That local object should be loaded by the process
that is currently binding to the object.
Figure 10-13. The
representation of an instance contact address.

Loading follows a standard
protocol, similar to class loading in Java. After the implementation has been
loaded and the local object created, initialization takes place by passing the
initialization string to the object. At that point, the object identifier has
been completed resolved.
Note the difference in
object referencing between CORBA and Globe, a difference which occurs
frequently in distributed object-based systems. Where CORBA references contain
exact information where to contact an object, Globe references require an
additional lookup step to retrieve that information. This distinction also
appears in systems such as Ice, where the CORBA equivalent is referred to as a
direct reference, and the Globe equivalent as an indirect reference (Henning
and Spruiell, 2005).
10.5. Synchronization
There are only a few issues
regarding synchronization in distributed systems that are specific to dealing
with distributed objects. In particular, the fact that implementation details
are hidden behind interfaces may cause problems: when a process invokes a
(remote) object, it has no knowledge whether that invocation will lead to
invoking other objects. As a consequence, if an object is protected against
concurrent accesses, we may have a cascading set of locks that the invoking
process is unaware of, as sketched in Fig. 10-14(a).
Figure 10-14. Differences in
control flow for locking objects
(This item is displayed on
page 471 in the print version)
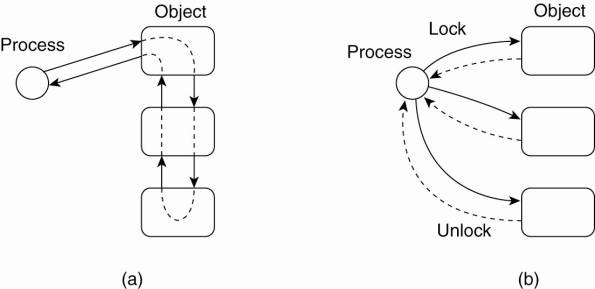
In contrast, when dealing
with data resources such as files or database tables that are protected by
locks, the pattern for the control flow is actually visible to the process
using those resources, as shown in Fig. 10-14(b). As a consequence, the process
can also exert more control at runtime when things go wrong, such as giving up
locks when it believes a deadlock has occurred. Note that transaction
processing systems generally follow the pattern shown in Fig. 10-14(b).
[Page 471]
In object-based distributed
systems it is therefore important to know where and when synchronization takes
place. An obvious location for synchronization is at the object server. If
multiple invocation requests for the same object arrive, the server can decide
to serialize those requests (and possibly keep a lock on an object when it
needs to do a remote invocation itself).
However, letting the object
server maintain locks complicates matters in the case that invoking clients
crash. For this reason, locking can also be done at the client side, an
approach that has been adopted in Java. Unfortunately, this scheme has its own
drawbacks.
As we mentioned before, the
difference between local and remote objects in Java is often difficult to make.
Matters become more complicated when objects are protected by declaring its
methods to be synchronized. If two processes simultaneously call a synchronized
method, only one of the processes will proceed while the other will be blocked.
In this way, we can ensure that access to an object's internal data is
completely serialized. A process can also be blocked inside an object, waiting
for some condition to become true.
Logically, blocking in a
remote object is simple. Suppose that client A calls a synchronized method of a
remote object. To make access to remote objects look always exactly the same as
to local objects, it would be necessary to block A in the client-side stub that
implements the object's interface and to which A has direct access. Likewise,
another client on a different machine would need to be blocked locally as well
before its request can be sent to the server. The consequence is that we need
to synchronize different clients at different machines. As we discussed in
Chap. 6, distributed synchronization can be fairly complex.
An alternative approach
would be to allow blocking only at the server. In principle, this works fine,
but problems arise when a client crashes while its invocation is being handled
by the server. As we discussed in Chap. 8, we may require relatively sophisticated
protocols to handle this situation, and which that may significantly affect the
overall performance of remote method invocations.
[Page 472]
Therefore, the designers of
Java RMI have chosen to restrict blocking on remote objects only to the proxies
(Wollrath et al., 1996). This means that threads in the same process will be
prevented from concurrently accessing the same remote object, but threads in
different processes will not. Obviously, these synchronization semantics are
tricky: at the syntactic level (i.e., when reading source code) we may see a
nice, clean design. Only when the distributed application is actually executed,
unanticipated behavior may be observed that should have been dealt with at
design time. Here we see a clear example where striving for distribution
transparency is not the way to go.
10.6. Consistency and
Replication
Many object-based
distributed systems follow a traditional approach toward replicated objects,
effectively treating them as containers of data with their own special
operations. As a result, when we consider how replication is handled in systems
supporting Java beans, or CORBA-compliant distributed systems, there is not
really that much new to report other than what we have discussed in Chap. 7.
For this reason, we focus on
a few particular topics regarding consistency and replication that are more
profound in object-based distributed systems than others. We will first
consider consistency and move to replicated invocations.
10.6.1. Entry Consistency
As we mentioned in Chap. 7,
data-centric consistency for distributed objects comes naturally in the form of
entry consistency. Recall that in this case, the goal is to group operations on
shared data using synchronization variables (e.g., in the form of locks). As
objects naturally combine data and the operations on that data, locking objects
during an invocation serializes access and keeps them consistent.
Although conceptually
associating a lock with an object is simple, it does not necessarily provide a
proper solution when an object is replicated. There are two issues that need to
be solved for implementing entry consistency. The first one is that we need a
means to prevent concurrent execution of multiple invocations on the same
object. In other words, when any method of an object is being executed, no
other methods may be executed. This requirement ensures that access to the
internal data of an object is indeed serialized. Simply using local locking
mechanisms will ensure this serialization.
The second issue is that in
the case of a replicated object, we need to ensure that all changes to the
replicated state of the object are the same. In other words, we need to make
sure that no two independent method invocations take place on different
replicas at the same time. This requirement implies that we need to order
invocations such that each replica sees all invocations in the same order. This
requirement can generally be met in one of two ways: (1) using a primary-based
approach or (2) using totally-ordered multicast to the replicas.
[Page 473]
In many cases, designing
replicated objects is done by first designing a single object, possibly
protecting it against concurrent access through local locking, and subsequently
replicating it. If we were to use a primary-based scheme, then additional
effort from the application developer is needed to serialize object
invocations. Therefore, it is often convenient to assume that the underlying
middleware supports totally-ordered multicasting, as this would not require any
changes at the clients, nor would it require additional programming effort from
application developers. Of course, how the totally ordered multicasting is
realized by the middleware should be transparent. For all the application may
know, its implementation may use a primary-based scheme, but it could equally
well be based on Lamport clocks.
However, even if the
underlying middleware provides totally-ordered multicasting, more may be needed
to guarantee orderly object invocation. The problem is one of granularity:
although all replicas of an object server may receive invocation requests in
the same order, we need to ensure that all threads in those servers process
those requests in the correct order as well. The problem is sketched in Fig.
10-15.
Figure 10-15. Deterministic
thread scheduling for replicated object servers.
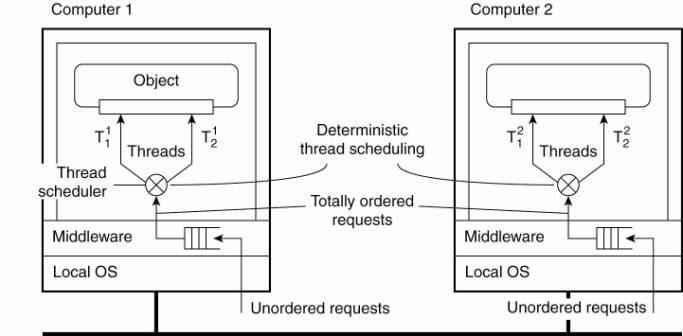
Multithreaded (object)
servers simply pick up an incoming request, pass it on to an available thread,
and wait for the next request to come in. The server's thread scheduler
subsequently allocates the CPU to runnable threads. Of course, if the
middleware has done its best to provide a total ordering for request delivery,
the thread schedulers should operate in a deterministic fashion in order not to
mix the ordering of method invocations on the same object. In other words, If
threads and from Fig. 10-15 handle the same incoming (replicated) invocation
request, they should both be scheduled before
and , respectively.
[Page 474]
Of course, simply scheduling
all threads deterministically is not necessary. In principle, if we already
have totally-ordered request delivery, we need only to ensure that all requests
for the same replicated object are handled in the order they were delivered.
Such an approach would allow invocations for different objects to be processed
concurrently, and without further restrictions from the thread scheduler.
Unfortunately, only few systems exist that support such concurrency.
One approach, described in
Basile et al. (2002), ensures that threads sharing the same (local) lock are
scheduled in the same order on every replica. At the basics lies a
primary-based scheme in which one of the replica servers takes the lead in
determining, for a specific lock, which thread goes first. An improvement that
avoids frequent communication between servers is described in Basile et al.
(2003). Note that threads that do not share a lock can thus operate
concurrently on each server.
One drawback of this scheme
is that it operates at the level of the underlying operating system, meaning
that every lock needs to be managed. By providing application-level
information, a huge improvement in performance can be made by identifying only
those locks that are needed for serializing access to replicated objects
(Taiani et al., 2005). We return to these issues when we discuss fault
tolerance for Java.
Replication Frameworks
An interesting aspect of
most distributed object-based systems is that by nature of the object
technology it is often possible to make a clean separation between devising
functionality and handling extra-functional issues such as replication. As we
explained in Chap. 2, a powerful mechanism to accomplish this separation is
formed by interceptors.
Babaoglu et al. (2004)
describe a framework in which they use interceptors to replicate Java beans for
J2EE servers. The idea is relatively simple: invocations to objects are
intercepted at three different points, as also shown in Fig. 10-16:
At the client side just
before the invocation is passed to the stub.
Inside the client's stub,
where the interception forms part of the replication algorithm.
At the server side, just
before the object is about to be invoked.
Figure 10-16. A general
framework for separating replication algorithms from objects in an EJB
environment.
(This item is displayed on
page 475 in the print version)
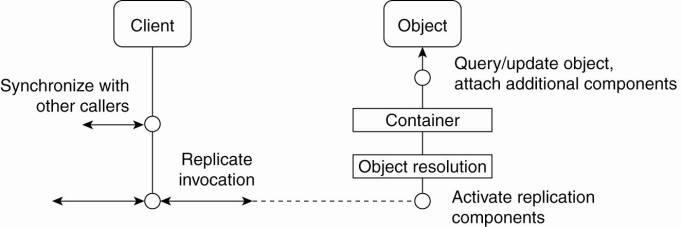
The first interception is
needed when it turns out that the caller is replicated. In that case,
synchronization with the other callers may be needed as we may be dealing with
a replicated invocation as discussed before.
[Page 475]
Once it has been decided that
the invocation can be carried out, the interceptor in the client-side stub can
take decisions on where to be forward the request to, or possibly implement a
fail-over mechanism when a replica cannot be reached.
Finally, the server-side
interceptor handles the invocation. In fact, this interceptor is split into
two. At the first point, just after the request has come in and before it is
handed over to an adapter, the replication algorithm gets control. It can then
analyze for whom the request is intended allowing it to activate, if necessary,
any replication objects that it needs to carry out the replication. The second
point is just before the invocation, allowing the replication algorithm to, for
example, get and set attribute values of the replicated object.
The interesting aspect is
that the framework can be set up independent of any replication algorithm, thus
leading to a complete separation of object functionality and replication of
objects.
10.6.2. Replicated
Invocations
Another problem that needs
to be solved is that of replicated invocations. Consider an object A calling
another object B as shown in Fig. 10-17. Object B is assumed to call yet
another object C. If B is replicated, each replica of B will, in principle, call
C independently. The problem is that C is now called multiple times instead of
only once. If the called method on C results in the transfer of $100,000, then
clearly, someone is going to complain sooner or later.
Figure 10-17. The problem of
replicated method invocations.
(This item is displayed on
page 476 in the print version)
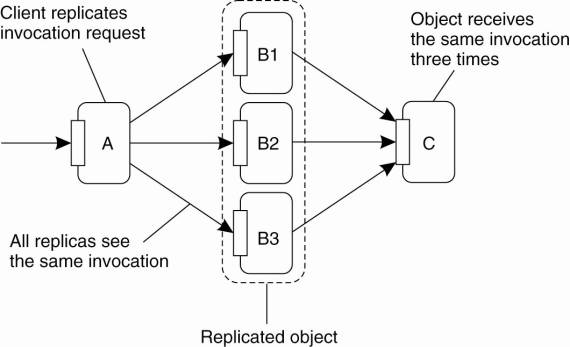
There are not many
general-purpose solutions to solve the problem of replicated invocations. One
solution is to simply forbid it (Maassen et al., 2001), which makes sense when
performance is at stake. However, when replicating for fault tolerance, the
following solution proposed by Mazouni et al. (1995) may be deployed. Their
solution is independent of the replication policy, that is, the exact details
of how replicas are kept consistent. The essence is to provide a
replication-aware communication layer on top of which (replicated) objects
execute. When a replicated object B invokes another replicated object C, the
invocation request is first assigned the same, unique identifier by each
replica of B. At that point, a coordinator of the replicas of B forwards its
request to all the replicas of object C, while the other replicas of B hold
back their copy of the invocation request, as shown in Fig. 10-18(a). The
result is that only a single request is forwarded to each replica of C.
[Page 476]
Figure 10-18. (a) Forwarding
an invocation request from a replicated object to another replicated object.
(b) Returning a reply from one replicated object to another.
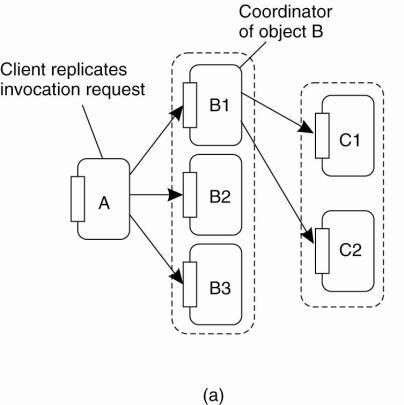
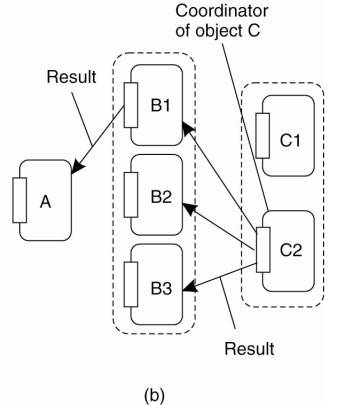
The same mechanism is used
to ensure that only a single reply message is returned to the replicas of B.
This situation is shown in Fig. 10-18(b). A coordinator of the replicas of C
notices it is dealing with a replicated reply message that has been generated
by each replica of C. However, only the coordinator forwards that reply to the
replicas of object B, while the other replicas of C hold back their copy of the
reply message.
[Page 477]
When a replica of B receives
a reply message for an invocation request it had either forwarded to C or held
back because it was not the coordinator, the reply is then handed to the actual
object.
In essence, the scheme just
described is based on using multicast communication, but in preventing that the
same message is multicast by different replicas. As such, it is essentially a
sender-based scheme. An alternative solution is to let a receiving replica
detect multiple copies of incoming messages belonging to the same invocation,
and to pass only one copy to its associated object. Details of this scheme are
left as an exercise.
10.7. Fault Tolerance
Like replication, fault
tolerance in most distributed object-based systems use the same mechanisms as
in other distributed systems, following the principles we discussed in Chap. 8.
However, when it comes to standardization, CORBA arguably provides the most
comprehensive specification.
10.7.1. Example:
Fault-Tolerant CORBA
The basic approach for
dealing with failures in CORBA is to replicate objects into object groups. Such
a group consists of one or more identical copies of the same object. However,
an object group can be referenced as if it were a single object. A group offers
the same interface as the replicas it contains. In other words, replication is
transparent to clients. Different replication strategies are supported, including
primary-backup replication, active replication, and quorum-based replication.
These strategies have all been discussed in Chap. 7. There are various other
properties associated with object groups, the details of which can be found in
OMG (2004a).
To provide replication and
failure transparency as much as possible, object groups should not be
distinguishable from normal CORBA objects, unless an application prefers
otherwise. An important issue, in this respect, is how object groups are
referenced. The approach followed is to use a special kind of IOR, called an
Interoperable Object Group Reference (IOGR). The key difference with a normal
IOR is that an IOGR contains multiple references to different objects, notably
replicas in the same object group. In contrast, an IOR may also contain
multiple references, but all of them will refer to the same object, although
possibly using a different access protocol.
[Page 478]
Whenever a client passes an
IOGR to its runtime system (RTS), that RTS attempts to bind to one of the
referenced replicas. In the case of IIOP, the RTS may possibly use additional
information it finds in one of the IIOP profiles of the IOGR. Such information
can be stored in the Components field we discussed previously. For example, a
specific IIOP profile may refer to the primary or a backup of an object group,
as shown in Fig. 10-19, by means of the separate tags TAG_PRIMARY and
TAG_BACKUP, respectively.
Figure 10-19. A possible
organization of an IOGR for an object group having a primary and backups.
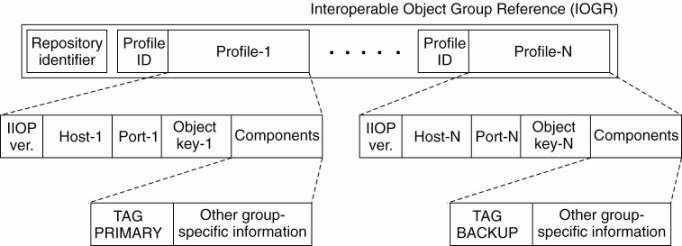
If binding to one of the
replicas fails, the client RTS may continue by attempting to bind to another
replica, thereby following any policy for next selecting a replica that it
suits to best. To the client, the binding procedure is completely transparent;
it appears as if the client is binding to a regular CORBA object.
An Example Architecture
To support object groups and
to handle additional failure management, it is necessary to add components to
CORBA. One possible architecture of a fault-tolerant version of CORBA is shown
in Fig. 10-20. This architecture is derived from the Eternal system (Moser et
al., 1998; and Narasimhan et al., 2000), which provides a fault tolerance
infrastructure constructed on top of the Totem reliable group communication
system (Moser et al., 1996).
Figure 10-20. An example
architecture of a fault-tolerant CORBA system.
(This item is displayed on
page 479 in the print version)
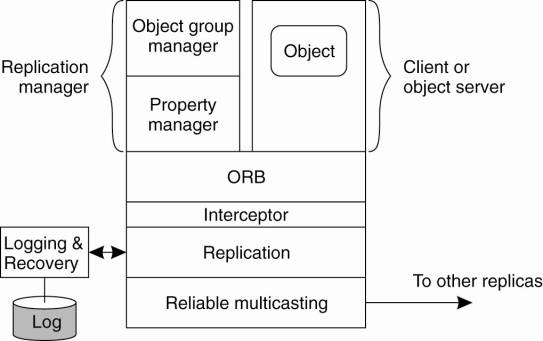
There are several components
that play an important role in this architecture. By far the most important one
is the replication manager, which is responsible for creating and managing a
group of replicated objects. In principle, there is only one replication
manager, although it may be replicated for fault tolerance.
As we have stated, to a
client there is no fundamental difference between an object group and any other
type of CORBA object. To create an object group, a client simply invokes the
normal create_object operation as offered, in this case, by the replication
manager, specifying the type of object to create. The client remains unaware of
the fact that it is implicitly creating an object group. The number of replicas
that are created when starting a new object group is normally determined by the
system-dependent default value. The replica manager is also responsible for
replacing a replica in the case of a failure, thereby ensuring that the number
of replicas does not drop below a specified minimum.
[Page 479]
The architecture also shows
the use of message-level interceptors. In the case of the Eternal system, each
invocation is intercepted and passed to a separate replication component that
maintains the required consistency for an object group and which ensures that
messages are logged to enable recovery.
Invocations are subsequently
sent to the other group members using reliable, totally-ordered multicasting.
In the case of active replication, an invocation request is passed to each
replica object by handing it to that object's underlying runtime system.
However, in the case of passive replication, an invocation request is passed
only to the RTS of the primary, whereas the other servers only log the
invocation request for recovery purposes. When the primary has completed the
invocation, its state is then multicast to the backups.
This architecture is based
on using interceptors. Alternative solutions exist as well, including those in
which fault tolerance has been incorporated in the runtime system (potentially
affecting interoperability), or in which special services are used on top of
the RTS to provide fault tolerance. Besides these differences, practice shows
that there are other problems not (yet) covered by the CORBA standard. As an
example of one problem that occurs in practice, if replicas are created on
different implementations, there is no guarantee that this approach will
actually work. A review of the different approaches and an assessment of fault
tolerance in CORBA is discussed in Felber and Narasimhan (2004).
10.7.2. Example:
Fault-Tolerant Java
Considering the popularity
of Java as a language and platform for developing distributed applications,
some effort has also been into adding fault tolerance to the Java runtime system.
An interesting approach is to ensure that the Java virtual machine can be used
for active replication.
Active replication
essentially dictates that the replica servers execute as deter-ministic
finite-state machines (Schneider, 1990). An excellent candidate in Java to
fulfill this role is the Java Virtual Machine (JVM). Unfortunately, the JVM is
not deterministic at all. There are various causes for nondeterministic
behavior, identified independently by Napper et al. (2003) and Friedman and
Kama (2003):
JVM can execute native code,
that is, code that is external to the JVM and provided to the latter through an
interface. The JVM treats native code like a black box: it sees only the
interface, but has no clue about the (potentially nondeterministic) behavior
that a call causes. Therefore, in order to use the JVM for active replication,
it is necessary to make sure that native code behaves in a deterministic way.
Input data may be subject to
nondeterminism. For example, a shared variable that can be manipulated by
multiple threads may change for different instances of the JVM as long as
threads are allowed to operate concurrently. To control this behavior, shared
data should at the very least be protected through locks. As it turned out, the
Java runtime environment did not always adhere to this rule, despite its
support for multithreading.
In the presence of failures,
different JVMs will produce different output revealing that the machines have
been replicated. This difference may cause problems when the JVMs need to
brought back into the same state. Matters are simplified if one can assume that
all output is idempotent (i.e., can simply be replayed), or is testable so that
one can check whether output was produced before a crash or not. Note that this
assumption is necessary in order to allow a replica server to decide whether or
not it should re-execute an operation.
Practice shows that turning
the JVM into a deterministic finite-state machine is by no means trivial. One
problem that needs to be solved is the fact that replica servers may crash. One
possible organization is to let the servers run according to a primary-backup
scheme. In such a scheme, one server coordinates all actions that need to be
performed, and from time to time instructs the backup to do the same. Careful
coordination between primary and backup is required, of course.
[Page 481]
Note that despite the fact
that replica servers are organized in a primary-backup setting, we are still
dealing with active replication: the replicas are kept up to date by letting
each of them execute the same operations in the same order. However, to ensure
the same nondeterministic behavior by all of the servers, the behavior of one
server is taken as the one to follow.
In this setting, the
approach followed by Friedman and Kama (2003) is to let the primary first
execute the instructions of what is called a frame. A frame consists of the
execution of several context switches and ends either because all threads are
blocking for I/O to complete, or after a predefined number of context switches
has taken place. Whenever a thread issues an I/O operation, the thread is
blocked by the JVM put on hold. When a frame starts, the primary lets all I/O
requests proceed, one after the other, and the results are sent to the other
replicas. In this way, at least deterministic behavior with respect to I/O operations
is enforced.
The problem with this scheme
is easily seen: the primary is always ahead of the other replicas. There are
two situations we need to consider. First, if a replica server other than the
primary crashes, no real harm is done except that the degree of fault tolerance
drops. On the other hand, when the primary crashes, we may find ourselves in a
situation that data (or rather, operations) are lost.
To minimize the damage, the
primary works on a per-frame basis. That is, it sends update information to the
other replicas only after completion of its current frame. The effect of this
approach is that when the primary is working on the k-th frame, that the other
replica servers have all the information needed to process the frame preceding
the k-th one. The damage can be limited by making frames small, at the price of
more communication between the primary and the backups.
10.8. Security
Obviously, security plays an
important role in any distributed system and object-based ones are no
exception. When considering most object-based distributed systems, the fact
that distributed objects are remote objects immediately leads to a situation in
which security architectures for distributed systems are very similar. In
essence, each object is protected through standard authentication and
authorization mechanisms, like the ones we discussed in Chap. 9.
To make clear how security can
fit in specifically in an object-based distributed system, we shall discuss the
security architecture for the Globe system. As we mentioned before, Globe
supports truly distributed objects in which the state of a single object can be
spread and replicated across multiple machines. Remote objects are just a
special case of Globe objects. Therefore, by considering the Globe security
architecture, we can also see how its approach can be equally applied to more
traditional object-based distributed systems. After discussing Globe, we
briefly take a look at security in traditional object-based systems.
[Page 482]
10.8.1. Example: Globe
As we said, Globe is one of
the few distributed object-based systems in which an object's state can be
physically distributed and replicated across multiple machines. This approach
also introduces specific security problems, which have led to an architecture
as described in Popescu et al. (2002).
Overview
When we consider the general
case of invoking a method on a remote object, there are at least two issues
that are important from a security perspective: (1) is the caller invoking the
correct object and (2) is the caller allowed to invoke that method. We refer to
these two issues as secure object binding and secure method invocation,
respectively. The former has everything to do with authentication, whereas the
latter involves authorization. For Globe and other systems that support either
replication or moving objects around, we have an additional problem, namely
that of platform security. This kind of security comprises two issues. First,
how can the platform to which a (local) object is copied be protected against
any malicious code contained in the object, and secondly, how can the object be
protected against a malicious replica server.
Being able to copy objects
to other hosts also brings up another problem. Because the object server that
is hosting a copy of an object need not always be fully trusted, there must be
a mechanism that prevents that every replica server hosting an object from
being allowed to also execute any of an object's methods. For example, an
object's owner may want to restrict the execution of update methods to a small
group of replica servers, whereas methods that only read the state of an object
may be executed by any authenticated server. Enforcing such policies can be
done through reverse access control, which we discuss in more detail below.
There are several mechanisms
deployed in Globe to establish security. First, every Globe object has an
associated public/private key pair, referred to as the object key. The basic
idea is that anyone who has knowledge about an object's private key can set the
access policies for users and servers. In addition, every replica has an
associated replica key, which is also constructed as a public/private key pair.
This key pair is generated by the object server currently hosting the specific
replica. As we will see, the replica key is used to make sure that a specific
replica is part of a given distributed shared object. Finally, each user is
also assumed to have a unique public/private key pair, known as the user key.
These keys are used to set
the various access rights in the form of certificates. Certificates are handed
out per object. There are three types, as shown in Fig. 10-21. A user
certificate is associated with a specific user and specifies exactly which
methods that user is allowed to invoke. To this end, the certificate contains a
bit string U with the same length as the number of methods available for the
object. U [i] = 1 if and only if the user is allowed to invoke method Mi.
Likewise, there is also a replica certificate that specifies, for a given
replica server, which methods it is allowed to execute. It also has an
associated bit string R, where R [i] = i if and only if the server is allowed
to execute method Mi.
[Page 483]
Figure 10-21. Certificates
in Globe: (a) a user certificate, (b) a replica certificate, (c) an
administrative certificate.
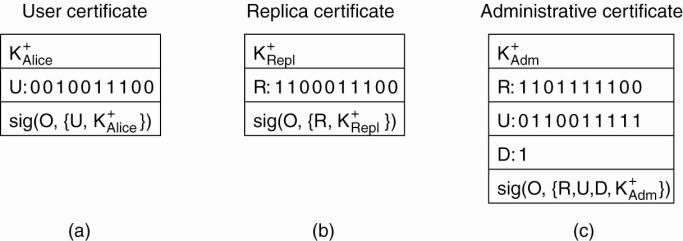
For example, the user
certificate in Fig. 10-21(a) tells that Alice (who can be identified through
her public key ), has the right to invoke methods M2, M5, M6, and M7 (note that
we start indexing U at 0). Likewise, the replica certificate states that the
server owning is allowed to execute
methods M0, M1, M5, M6, and M7.
An administrative
certificate can be used by any authorized entity to issue user and replica
certificates. In the case, the R and U bit strings specify for which methods
and which entities a certificate can be created. Moreover, there is bit
indicating whether an administrative entity can delegate (part of) its rights
to someone else. Note that when Bob in his role as administrator creates a user
certificate for Alice, he will sign that certificate with his own signature,
not that of the object. As a consequence, Alice's certificate will need to be
traced back to Bob's administrative certificate, and eventually to an
administrative certificate signed with the object's private key.
Administrative certificates
come in handy when considering that some Globe objects may be massively
replicated. For example, an object's owner may want to manage only a relatively
small set of permanent replicas, but delegate the creation of server-initiated
replicas to the servers hosting those permanent replicas. In that case, the
owner may decide to allow a permanent replica to install other replicas for
read-only access by all users. Whenever Alice wants to invoke a read-only
method, she will succeed (provided she is authorized). However, when wanting to
invoke an update method, she will have to contact one of the permanent
replicas, as none of the other replica servers is allowed to execute such
methods.
As we explained, the binding
process in Globe requires that an object identifier (OID) is resolved to a
contact address. In principle, any system that supports flat names can be used
for this purpose. To securely associate an object's public key to its OID, we
simply compute the OID as a 160-bit secure hash of the public key. In this way,
anyone can verify whether a given public key belongs to a given OID. These
identifier are also known as self-certifying names, a concept pioneered in the
Secure File System (Mazieres et al., 1999), which we will discuss in Chap. 11.
[Page 484]
We can also check whether a
replica R belongs to an object O. In that case, we merely need to inspect the
replica certificate for R, and check who issued it. The signer may be an entity
with administrative rights, in which case we need to inspect its administrative
certificate. The bottom line is that we can construct a chain of certificates
of which the last one is signed using the object's private key. In that case,
we know that R is part of O.
To mutually protect objects
and hosts against each other, techniques for mobile code, as described in Chap.
9 are deployed. Detecting that objects have been tampered with can be done with
special auditing techniques which we will describe in Chap. 12.
Secure Method Invocation
Let us now look into the
details of securely invoking a method of a Globe object. The complete path from
requesting an invocation to actually executing the operation at a replica is
sketched in Fig. 10-22. A total of 13 steps need to be executed in sequence, as
shown in the figure and described in the following text.
Figure 10-22. Secure method
invocation in Globe.
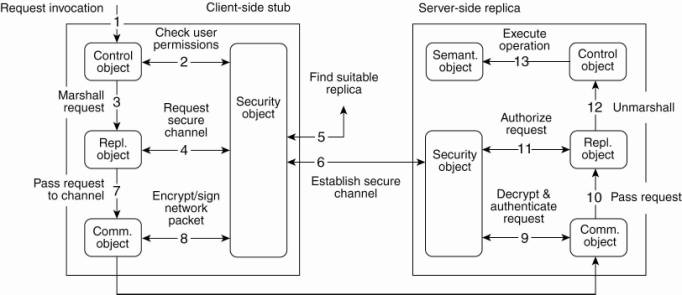
1. First, an application issues a
invocation request by locally calling the associated method, just like calling
a procedure in an RPC.
2. The control subobject checks the user
permissions with the information stored in the local security object. In this
case, the security object should have a valid user certificate.
3. The request is marshaled and passed on.
4. The replication subobject requests the
middleware to set up a secure channel to a suitable replica.
5. The security object first initiates a
replica lookup. To achieve this goal, it could use any naming service that can
look up replicas that have been specified to be able to execute certain
methods. The Globe location service has been modified to handle such lookups
(Ballintijn, 2003).
6. Once a suitable replica has been found,
the security subobject can set up a secure channel with its peer, after which
control is returned to the replication subobject. Note that part of this
establishment requires that the replica proves it is allowed to carry out the
requested invocation.
7. The request is now passed on to the
communication subobject.
8. The subobject encrypts and signs the
request so that it can pass through the channel.
9. After its receipt, the request is
decrypted and authenticated.
10.
The request is then simply passed on
to the server-side replication subobject.
11.
Authorization takes place: in this
case the user certificate from the client-side stub has been passed to the
replica so that we can verify that the request can indeed be carried out.
12.
The request is then unmarshaled.
13.
Finally, the operation can be
executed.
Although this may seem to be
a relatively large number of steps, the example shows how a secure method
invocation can be broken down into small units, each unit being necessary to
ensure that an authenticated client can carry out an authorized invocation at
an authenticated replica. Virtually all object-based distributed systems follow
these steps. The difference with Globe is that a suitable replica needs to be
located, and that this replica needs to prove it may execute the method call.
We leave such a proof as an exercise to the reader.
10.8.2. Security for Remote
Objects
When using remote objects we
often see that the object reference itself is implemented as a complete
client-side stub, containing all the information that is needed to access the
remote object. In its simplest form, the reference contains the exact contact
address for the object and uses a standard marshaling and communication
protocol to ship an invocation to the remote object.
However, in systems such as
Java, the client-side stub (called a proxy) can be virtually anything. The
basic idea is that the developer of a remote object also develops the proxy and
subsequently registers the proxy with a directory service. When a client is
looking for the object, it will eventually contact the directory service,
retrieve the proxy, and install it. There are obviously some serious problems
with this approach.
First, if the directory
service is hijacked, then an attacker may be able to return a bogus proxy to
the client. In effect, such a proxy may be able to compromise all communication
between the client and the server hosting the remote object, damaging both of
them.
Second, the client has no
way to authenticate the server: it only has the proxy and all communication
with the server necessarily goes through that proxy. This may be an undesirable
situation, especially because the client now simply needs to trust the proxy
that it will do its work correctly.
Likewise, it may be more
difficult for the server to authenticate the client. Authentication may be
necessary when sensitive information is sent to the client. Also, because
client authentication is now tied to the proxy, we may also have the situation
that an attacker is spoofing a client causing damage to the remote object.
Li et al. (2004b) describe a
general security architecture that can be used to make remote object
invocations safer. In their model, they assume that proxies are indeed provided
by the developer of a remote object and registered with a directory service.
This approach is followed in Java RMI, but also Jini (Sun Microsystems, 2005).
The first problem to solve
is to authenticate a remote object. In their solution, Li and Mitchell propose
a two-step approach. First, the proxy which is downloaded from a directory
service is signed by the remote object allowing the client to verify its
origin. The proxy, in turn, will authenticate the object using TLS with server
authentication, as we discussed in Chap. 9. Note that it is the object
developer's task to make sure that the proxy indeed properly authenticates the
object. The client will have to rely on this behavior, but because it is
capable of authenticating the proxy, relying on object authentication is at the
same level as trusting the remote object to behave decently.
To authenticate the client,
a separate authenticator is used. When a client is looking up the remote
object, it will be directed to this authenticator from which it downloads an
authentication proxy. This is a special proxy that offers an interface by which
the client can have itself authenticated by the remote object. If this
authentication succeeds, then the remote object (or actually, its object
server) will pass on the actual proxy to the client. Note that this approach
allows for authentication independent of the protocol used by the actual proxy,
which is considered an important advantage.
[Page 487]
Another important advantage
of separating client authentication is that it is now possible to pass
dedicated proxies to clients. For example, certain clients may be allowed to
request only execution of read-only methods. In such a case, after authentication
has taken place, the client will be handed a proxy that offers only such
methods, and no other. More refined access control can easily be envisaged.