Chapter 11. Distributed File
Systems
Considering that sharing
data is fundamental to distributed systems, it is not surprising that
distributed file systems form the basis for many distributed applications.
Distributed file systems allow multiple processes to share data over long
periods of time in a secure and reliable way. As such, they have been used as
the basic layer for distributed systems and applications. In this chapter, we
consider distributed file systems as a paradigm for general-purpose distributed
systems.
11.1. Architecture
We start our discussion on
distributed file systems by looking at how they are generally organized. Most
systems are built following a traditional client-server architecture, but fully
decentralized solutions exist as well. In the following, we will take a look at
both kinds of organizations.
11.1.1. Client-Server
Architectures
Many distributed files
systems are organized along the lines of client-server architectures, with Sun
Microsystem's Network File System (NFS) being one of the most widely-deployed
ones for UNIX-based systems. We will take NFS as a canonical example for
server-based distributed file systems throughout this chapter. In particular,
we concentrate on NFSv3, the widely-used third version of NFS (Callaghan, 2000)
and NFSv4, the most recent, fourth version (Shepler et al., 2003). We will
discuss the differences between them as well.
[Page 492]
The basic idea behind NFS is
that each file server provides a standardized view of its local file system. In
other words, it should not matter how that local file system is implemented;
each NFS server supports the same model. This approach has been adopted for
other distributed files systems as well. NFS comes with a communication
protocol that allows clients to access the files stored on a server, thus allowing
a heterogeneous collection of processes, possibly running on different
operating systems and machines, to share a common file system.
The model underlying NFS and
similar systems is that of a remote file service. In this model, clients are
offered transparent access to a file system that is managed by a remote server.
However, clients are normally unaware of the actual location of files. Instead,
they are offered an interface to a file system that is similar to the interface
offered by a conventional local file system. In particular, the client is
offered only an interface containing various file operations, but the server is
responsible for implementing those operations. This model is therefore also
referred to as the remote access model. It is shown in Fig. 11-1(a).
Figure 11-1. (a) The remote
access model. (b) The upload/download model.
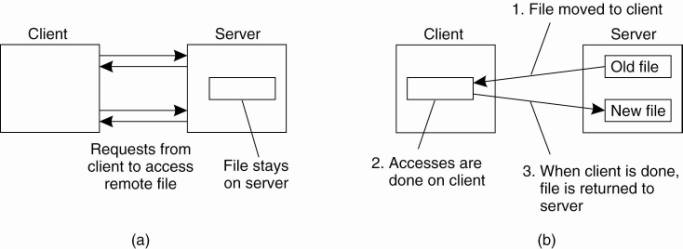
In contrast, in the
upload/download model a client accesses a file locally after having downloaded
it from the server, as shown in Fig. 11-1(b). When the client is finished with
the file, it is uploaded back to the server again so that it can be used by
another client. The Internet's FTP service can be used this way when a client
downloads a complete file, modifies it, and then puts it back.
NFS has been implemented for
a large number of different operating systems, although the UNIX-based versions
are predominant. For virtually all modern UNIX systems, NFS is generally
implemented following the layered architecture shown in Fig. 11-2.
Figure 11-2. The basic NFS
architecture for UNIX systems.
(This item is displayed on
page 493 in the print version)
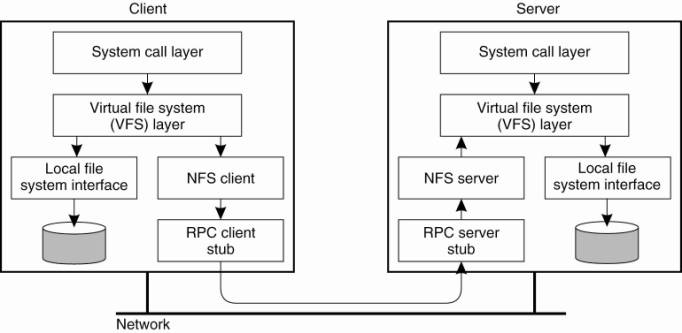
A client accesses the file
system using the system calls provided by its local operating system. However,
the local UNIX file system interface is replaced by an interface to the Virtual
File System (VFS), which by now is a de facto standard for interfacing to
different (distributed) file systems (Kleiman, 1986). Virtually all modern
operating systems provide VFS, and not doing so more or less forces developers
to largely reimplement huge of an operating system when adopting a new
file-system structure. With NFS, operations on the VFS interface are either
passed to a local file system, or passed to a separate component known as the
NFS client, which takes care of handling access to files stored at a remote
server. In NFS, all client-server communication is done through RPCs. The NFS
client implements the NFS file system operations as RPCs to the server. Note
that the operations offered by the VFS interface can be different from those
offered by the NFS client. The whole idea of the VFS is to hide the differences
between various file systems.
[Page 493]
On the server side, we see a
similar organization. The NFS server is responsible for handling incoming
client requests. The RPC stub unmarshals requests and the NFS server converts
them to regular VFS file operations that are subsequently passed to the VFS
layer. Again, the VFS is responsible for implementing a local file system in
which the actual files are stored.
An important advantage of
this scheme is that NFS is largely independent of local file systems. In
principle, it really does not matter whether the operating system at the client
or server implements a UNIX file system, a Windows 2000 file system, or even an
old MS-DOS file system. The only important issue is that these file systems are
compliant with the file system model offered by NFS. For example, MS-DOS with
its short file names cannot be used to implement an NFS server in a fully
transparent way.
File System Model
The file system model
offered by NFS is almost the same as the one offered by UNIX-based systems.
Files are treated as uninterpreted sequences of bytes. They are hierarchically
organized into a naming graph in which nodes represent directories and files.
NFS also supports hard links as well as symbolic links, like any UNIX file
system. Files are named, but are otherwise accessed by means of a UNIX-like
file handle, which we discuss in detail below. In other words, to access a
file, a client must first look up its name in a naming service and obtain the
associated file handle. Furthermore, each file has a number of attributes whose
values can be looked up and changed. We return to file naming in detail later
in this chapter.
Fig. 11-3 shows the general
file operations supported by NFS versions 3 and 4, respectively. The create operation
is used to create a file, but has somewhat different meanings in NFSv3 and
NFSv4. In version 3, the operation is used for creating regular files. Special
files are created using separate operations. The link operation is used to
create hard links. Symlink is used to create symbolic links. Mkdir is used to
create subdirectories. Special files, such as device files, sockets, and named
pipes are created by means of the mknod operation.
Figure 11-3. An incomplete
list of file system operations supported by NFS.
(This item is displayed on
page 495 in the print version)
|
Operation |
v3 |
v4 |
Description |
|
Create |
Yes |
No |
Create a regular file |
|
Create |
No |
Yes |
Create a nonregular file |
|
Link |
Yes |
Yes |
Create a hard link to a
file |
|
Symlink |
Yes |
No |
Create a symbolic link to
a file |
|
Mkdir |
Yes |
No |
Create a subdirectory in a
given directory |
|
Mknod |
Yes |
No |
Create a special file |
|
Rename |
Yes |
Yes |
Change the name of a file |
|
Remove |
Yes |
Yes |
Remove a file from a file
system |
|
Rmdir |
Yes |
No |
Remove an empty
subdirectory from a directory |
|
Open |
No |
Yes |
Open a file |
|
Close |
No |
Yes |
Close a file |
|
Lookup |
Yes |
Yes |
Look up a file by means of
a file name |
|
Readdir |
Yes |
Yes |
Read the entries in a
directory |
|
Readlink |
Yes |
Yes |
Read the path name stored
in a symbolic link |
|
Getattr |
Yes |
Yes |
Get the attribute values for
a file |
|
Setattr |
Yes |
Yes |
Set one or more attribute
values for a file |
|
Read |
Yes |
Yes |
Read the data contained in
a file |
|
Write |
Yes |
Yes |
Write data to a file |
This situation is changed
completely in NFSv4, where create is used for creating nonregular files, which
include symbolic links, directories, and special files. Hard links are still
created using a separate link operation, but regular files are created by means
of the open operation, which is new to NFS and is a major deviation from the
approach to file handling in older versions. Up until version 4, NFS was
designed to allow its file servers to be stateless. For reasons we discuss
later in this chapter, this design criterion has been abandoned in NFSv4, in
which it is assumed that servers will generally maintain state between
operations on the same file.
The operation rename is used
to change the name of an existing file the same as in UNIX.
Files are deleted by means
of the remove operation. In version 4, this operation is used to remove any
kind of file. In previous versions, a separate rmdir operation was needed to
remove a subdirectory. A file is removed by its name and has the effect that
the number of hard links to it is decreased by one. If the number of links
drops to zero, the file may be destroyed.
Version 4 allows clients to
open and close (regular) files. Opening a nonexisting file has the side effect
that a new file is created. To open a file, a client provides a name, along
with various values for attributes. For example, a client may specify that a
file should be opened for write access. After a file has been successfully
opened, a client can access that file by means of its file handle. That handle
is also used to close the file, by which the client tells the server that it
will no longer need to have access to the file. The server, in turn, can
release any state it maintained to provide that client access to the file.
[Page 495]
The lookup operation is used
to look up a file handle for a given path name. In NFSv3, the lookup operation
will not resolve a name beyond a mount point. (Recall from Chap. 5 that a mount
point is a directory that essentially represents a link to a subdirectory in a
foreign name space.) For example, assume that the name /remote/vu refers to a
mount point in a naming graph. When resolving the name /remote/vu/mbox, the
lookup operation in NFSv3 will return the file handle for the mount point
/remote/vu along with the remainder of the path name (i.e., mbox). The client
is then required to explicitly mount the file system that is needed to complete
the name lookup. A file system in this context is the collection of files,
attributes, directories, and data blocks that are jointly implemented as a
logical block device (Tanenbaum and Woodhull, 2006).
In version 4, matters have
been simplified. In this case, lookup will attempt to resolve the entire name,
even if this means crossing mount points. Note that this approach is possible
only if a file system has already been mounted at mount points. The client is
able to detect that a mount point has been crossed by inspecting the file
system identifier that is later returned when the lookup completes.
There is a separate
operation readdir to read the entries in a directory. This operation returns a
list of (name, file handle) pairs along with attribute values that the client
requested. The client can also specify how many entries should be returned. The
operation returns an offset that can be used in a subsequent call to readdir in
order to read the next series of entries.
[Page 496]
Operation readlink is used
to read the data associated with a symbolic link. Normally, this data
corresponds to a path name that can be subsequently looked up. Note that the
lookup operation cannot handle symbolic links. Instead, when a symbolic link is
reached, name resolution stops and the client is required to first call
readlink to find out where name resolution should continue.
Files have various
attributes associated with them. Again, there are important differences between
NFS version 3 and 4, which we discuss in detail later. Typical attributes
include the type of the file (telling whether we are dealing with a directory,
a symbolic link, a special file, etc.), the file length, the identifier of the
file system that contains the file, and the last time the file was modified.
File attributes can be read and set using the operations getattr and setattr,
respectively.
Finally, there are
operations for reading data from a file, and writing data to a file. Reading
data by means of the operation read is completely straightforward. The client
specifies the offset and the number of bytes to be read. The client is returned
the actual number of bytes that have been read, along with additional status
information (e.g., whether the end-of-file has been reached).
Writing data to a file is
done using the write operation. The client again specifies the position in the
file where writing should start, the number of bytes to be written, and the
data. In addition, it can instruct the server to ensure that all data are to be
written to stable storage (we discussed stable storage in Chap. 8). NFS servers
are required to support storage devices that can survive power supply failures,
operating system failures, and hardware failures.
11.1.2. Cluster-Based
Distributed File Systems
NFS is a typical example for
many distributed file systems, which are generally organized according to a
traditional client-server architecture. This architecture is often enhanced for
server clusters with a few differences.
Considering that server
clusters are often used for parallel applications, it is not surprising that
their associated file systems are adjusted accordingly. One well-known
technique is to deploy file-striping techniques, by which a single file is
distributed across multiple servers. The basic idea is simple: by distributing
a large file across multiple servers, it becomes possible to fetch different
parts in parallel. Of course, such an organization works well only if the
application is organized in such a way that parallel data access makes sense.
This generally requires that the data as stored in the file have a very regular
structure, for example, a (dense) matrix.
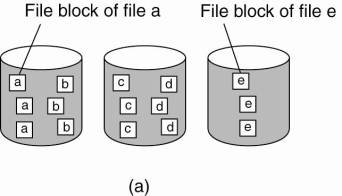
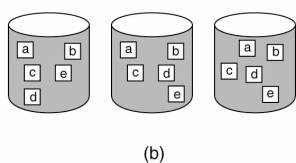
For general-purpose
applications, or those with irregular or many different types of data
structures, file striping may not be an effective tool. In those cases, it is
often more convenient to partition the file system as a whole and simply store
different files on different servers, but not to partition a single file across
multiple servers. The difference between these two approaches is shown in Fig.
11-4.
[Page 497]
Figure 11-4. The difference
between (a) distributing whole files across several servers and (b) striping
files for parallel access.
More interesting are the
cases of organizing a distributed file system for very large data centers such
as those used by companies like Amazon and Google. These companies offer
services to Web clients resulting in reads and updates to a massive number of
files distributed across literally tens of thousands of computers [see also
Barroso et al. (2003)]. In such environments, the traditional assumptions
concerning distributed file systems no longer hold. For example, we can expect
that at any single moment there will be a computer malfunctioning.
To address these problems,
Google, for example, has developed its own Google file system (GFS), of which
the design is described in Ghemawat et al. (2003). Google files tend to be very
large, commonly ranging up to multiple gigabytes, where each one contains lots
of smaller objects. Moreover, updates to files usually take place by appending
data rather than overwriting parts of a file. These observations, along with
the fact that server failures are the norm rather than the exception, lead to
constructing clusters of servers as shown in Fig. 11-5.
Figure 11-5. The
organization of a Google cluster of servers.
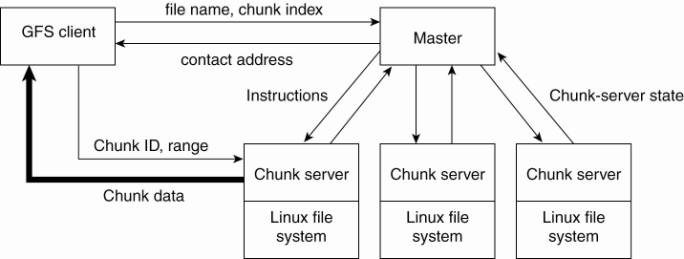
Each GFS cluster consists of
a single master along with multiple chunk servers. Each GFS file is divided
into chunks of 64 Mbyte each, after which these chunks are distributed across
what are called chunk servers. An important observation is that a GFS master is
contacted only for metadata information. In particular, a GFS client passes a
file name and chunk index to the master, expecting a contact address for the
chunk. The contact address contains all the information to access the correct
chunk server to obtain the required file chunk.
[Page 498]
To this end, the GFS master
essentially maintains a name space, along with a mapping from file name to
chunks. Each chunk has an associated identifier that will allow a chunk server
to lookup it up. In addition, the master keeps track of where a chunk is
located. Chunks are replicated to handle failures, but no more than that. An
interesting feature is that the GFS master does not attempt to keep an accurate
account of chunk locations. Instead, it occasionally contacts the chunk servers
to see which chunks they have stored.
The advantage of this scheme
is simplicity. Note that the master is in control of allocating chunks to chunk
servers. In addition, the chunk servers keep an account of what they have
stored. As a consequence, once the master has obtained chunk locations, it has
an accurate picture of where data is stored. However, matters would become
complicated if this view had to be consistent all the time. For example, every
time a chunk server crashes or when a server is added, the master would need to
be informed. Instead, it is much simpler to refresh its information from the
current set of chunk servers through polling. GFS clients simply get to know
which chunk servers the master believes is storing the requested data. Because
chunks are replicated anyway, there is a high probability that a chunk is
available on at least one of the chunk servers.
Why does this scheme scale?
An important design issue is that the master is largely in control, but that it
does not form a bottleneck due to all the work it needs to do. Two important
types of measures have been taken to accommodate scalability.
First, and by far the most
important one, is that the bulk of the actual work is done by chunk servers.
When a client needs to access data, it contacts the master to find out which
chunk servers hold that data. After that, it communicates only with the chunk
servers. Chunks are replicated according to a primary-backup scheme. When the
client is performing an update operation, it contacts the nearest chunk server
holding that data, and pushes its updates to that server. This server will push
the update to the next closest one holding the data, and so on. Once all
updates have been propagated, the client will contact the primary chunk server,
who will then assign a sequence number to the update operation and pass it on
to the backups. Meanwhile, the master is kept out of the loop.
Second, the (hierarchical)
name space for files is implemented using a simple single-level table, in which
path names are mapped to metadata (such as the equivalent of inodes in
traditional file systems). Moreover, this entire table is kept in main memory,
along with the mapping of files to chunks. Updates on these data are logged to
persistent storage. When the log becomes too large, a checkpoint is made by
which the main-memory data is stored in such a way that it can be immediately
mapped back into main memory. As a consequence, the intensity of I/O of a GFS
master is strongly reduced.
[Page 499]
This organization allows a
single master to control a few hundred chunk servers, which is a considerable
size for a single cluster. By subsequently organizing a service such as Google
into smaller services that are mapped onto clusters, it is not hard to imagine
that a huge collection of clusters can be made to work together.
11.1.3. Symmetric
Architectures
Of course, fully symmetric
organizations that are based on peer-to-peer technology also exist. All current
proposals use a DHT-based system for distributing data, combined with a
key-based lookup mechanism. An important difference is whether they build a
file system on top of a distributed storage layer, or whether whole files are
stored on the participating nodes.
An example of the first type
of file system is Ivy, a distributed file system that is built using a Chord
DHT-based system. Ivy is described in Muthitacharoen et al. (2002). Their
system essentially consists of three separate layers as shown in Fig. 11-6. The
lowest layer is formed by a Chord system providing basic decentralized lookup
facilities. In the middle is a fully distributed block-oriented storage layer.
Finally, on top there is a layer implementing an NFS-like file system.
Figure 11-6. The
organization of the Ivy distributed file system.

Data storage in Ivy is
realized by a Chord-based, block-oriented distributed storage system called
DHash (Dabek et al., 2001). In essence, DHash is quite simple. It only knows
about data blocks, each block typically having a size of 8 KB. Ivy uses two kinds
of data blocks. A content-hash block has an associated key, which is computed
as the secure hash of the block's content. In this way, whenever a block is
looked up, a client can immediately verify whether the correct block has been
looked up, or that another or corrupted version is returned. Furthermore, Ivy
also makes use of public-key blocks, which are blocks having a public key as
lookup key, and whose content has been signed with the associated private key.
[Page 500]
To increase availability,
DHash replicates every block B to the k immediate successors of the server
responsible for storing B. In addition, looked up blocks are also cached along
the route that the lookup request followed.
Files are implemented as a
separate data structure on top of DHash. To achieve this goal, each user
maintains a log of operations it carries out on files. For simplicity, we
assume that there is only a single user per node so that each node will have
its own log. A log is a linked list of immutable records, where each record
contains all the information related to an operation on the Ivy file system.
Each node appends records only to its own, local, log. Only a log's head is
mutable, and points to the most recently appended record. Each record is stored
in a separate content-hash block, whereas a log's head is kept in a public-key
block.
There are different types of
records, roughly corresponding to the different operations supported by NFS.
For example, when performing an update operation on a file, a write record is created,
containing the file's identifier along with the offset for the pile pointer and
the data that is being written. Likewise, there are records for creating files
(i.e., adding a new inode), manipulating directories, etc.
To create a new file system,
a node simply creates a new log along with a new inode that will serve as the
root. Ivy deploys what is known as an NFS loopback server which is just a local
user-level server that accepts NFS requests from local clients. In the case of
Ivy, this NFS server supports mounting the newly created file system allowing
applications to access it as any other NFS file system.
When performing a read
operation, the local Ivy NFS server makes a pass over the log, collecting data
from those records that represent write operations on the same block of data,
allowing it to retrieve the most recently stored values. Note that because each
record is stored as a DHash block, multiple lookups across the overlay network
may be needed to retrieve the relevant values.
Instead of using a separate
block-oriented storage layer, alternative designs propose to distribute whole
files instead of data blocks. The developers of Kosha (Butt et al. 2004)
propose to distribute files at a specific directory level. In their approach,
each node has a mount point named /kosha containing the files that are to be
distributed using a DHT-based system. Distributing files at directory level 1
means that all files in a subdirectory /kosha/a will be stored at the same
node. Likewise, distribution at level 2 implies that all files stored in
subdirectory /kosha/a/aa are stored at the same node. Taking a level-1
distribution as an example, the node responsible for storing files under
/kosha/a is found by computing the hash of a and taking that as the key in a
lookup.
The potential drawback of
this approach is that a node may run out of disk space to store all the files
contained in the subdirectory that it is responsible for. Again, a simple
solution is found in placing a branch of that subdirectory on another node and
creating a symbolic link to where the branch is now stored.
11.2. Processes
When it comes to processes,
distributed file systems have no unusual properties. In many cases, there will
be different types of cooperating processes: storage servers and file managers,
just as we described above for the various organizations.
The most interesting aspect
concerning file system processes is whether or not they should be stateless.
NFS is a good example illustrating the trade-offs. One of its long-lasting
distinguishing features (compared to other distributed file systems), was the
fact that servers were stateless. In other words, the NFS protocol did not
require that servers maintained any client state. This approach was followed in
versions 2 and 3, but has been abandoned for version 4.
The primary advantage of the
stateless approach is simplicity. For example, when a stateless server crashes,
there is essentially no need to enter a recovery phase to bring the server to a
previous state. However, as we explained in Chap. 8, we still need to take into
account that the client cannot be given any guarantees whether or not a request
has actually been carried out.
The stateless approach in
the NFS protocol could not always be fully followed in practical
implementations. For example, locking a file cannot easily be done by a
stateless server. In the case of NFS, a separate lock manager is used to handle
this situation. Likewise, certain authentication protocols require that the
server maintains state on its clients. Nevertheless, NFS servers could
generally be designed in such a way that only very little information on
clients needed to be maintained. For the most part, the scheme worked
adequately.
Starting with version 4, the
stateless approach was abandoned, although the new protocol is designed in such
a way that a server does not need to maintain much information about its
clients. Besides those just mentioned, there are other reasons to choose for a
stateful approach. An important reason is that NFS version 4 is expected to
also work across wide-area networks. This requires that clients can make
effective use of caches, in turn requiring an efficient cache consistency
protocol. Such protocols often work best in collaboration with a server that
maintains some information on files as used by its clients. For example, a
server may associate a lease with each file it hands out to a client, promising
to give the client exclusive read and write access until the lease expires or
is refreshed. We return to such issues later in this chapter.
The most apparent difference
with the previous versions is the support for the open operation. In addition,
NFS supports callback procedures by which a server can do an RPC to a client.
Clearly, callbacks also require a server to keep track of its clients.
Similar reasoning has
affected the design of other distributed file systems. By and large, it turns
out that maintaining a fully stateless design can be quite difficult, often
leading to building stateful solutions as an enhancement, such as is the case
with NFS file locking.
11.3. Communication
As with processes, there is
nothing particularly special or unusual about communication in distributed file
systems. Many of them are based on remote procedure calls (RPCs), although some
interesting enhancements have been made to support special cases. The main reason
for choosing an RPC mechanism is to make the system independent from underlying
operating systems, networks, and transport protocols.
11.3.1. RPCs in NFS
For example, in NFS, all
communication between a client and server proceeds along the Open Network Computing
RPC (ONC RPC) protocol, which is formally defined in Srinivasan (1995a), along
with a standard for representing marshaled data (Srinivasan, 1995b). ONC RPC is
similar to other RPC systems as we discussed in Chap. 4.
Every NFS operation can be
implemented as a single remote procedure call to a file server. In fact, up
until NFSv4, the client was made responsible for making the server's life as
easy as possible by keeping requests relatively simple. For example, in order
to read data from a file for the first time, a client normally first had to
look up the file handle using the lookup operation, after which it could issue
a read request, as shown in Fig. 11-7(a).
Figure 11-7. (a) Reading
data from a file in NFS version 3. (b) Reading data using a compound procedure
in version 4.

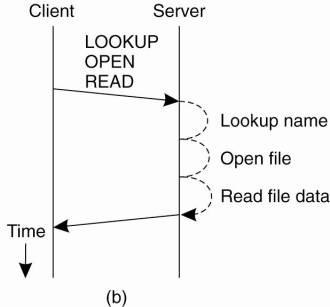
This approach required two
successive RPCs. The drawback became apparent when considering the use of NFS
in a wide-area system. In that case, the extra latency of a second RPC led to
performance degradation. To circumvent such problems, NFSv4 supports compound
procedures by which several RPCs can be grouped into a single request, as shown
in Fig. 11-7(b).
[Page 503]
In our example, the client
combines the lookup and read request into a single RPC. In the case of version
4, it is also necessary to open the file before reading can take place. After
the file handle has been looked up, it is passed to the open operation, after
which the server continues with the read operation. The overall effect in this
example is that only two messages need to be exchanged between the client and
server.
There are no transactional
semantics associated with compound procedures. The operations grouped together
in a compound procedure are simply handled in the order as requested. If there
are concurrent operations from other clients, then no measures are taken to
avoid conflicts. If an operation fails for whatever reason, then no further
operations in the compound procedure are executed, and the results found so far
are returned to the client. For example, if lookup fails, a succeeding open is
not even attempted.
11.3.2. The RPC2 Subsystem
Another interesting
enhancement to RPCs has been developed as part of the Coda file system (Kistler
and Satyanarayanan, 1992). RPC2 is a package that offers reliable RPCs on top
of the (unreliable) UDP protocol. Each time a remote procedure is called, the
RPC2 client code starts a new thread that sends an invocation request to the
server and subsequently blocks until it receives an answer. As request
processing may take an arbitrary time to complete, the server regularly sends
back messages to the client to let it know it is still working on the request.
If the server dies, sooner or later this thread will notice that the messages
have ceased and report back failure to the calling application.
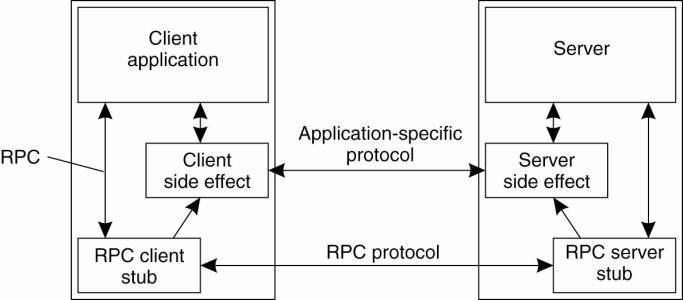
An interesting aspect of
RPC2 is its support for side effects. A side effect is a mechanism by which the
client and server can communicate using an application-specific protocol.
Consider, for example, a client opening a file at a video server. What is needed
in this case is that the client and server set up a continuous data stream with
an isochronous transmission mode. In other words, data transfer from the server
to the client is guaranteed to be within a minimum and maximum end-to-end
delay.
RPC2 allows the client and
the server to set up a separate connection for transferring the video data to
the client on time. Connection setup is done as a side effect of an RPC call to
the server. For this purpose, the RPC2 runtime system provides an interface of
side-effect routines that is to be implemented by the application developer.
For example, there are routines for setting up a connection and routines for
transferring data. These routines are automatically called by the RPC2 runtime
system at the client and server, respectively, but their implementation is
otherwise completely independent of RPC2. This principle of side effects is
shown in Fig. 11-8.
Figure 11-8. Side effects in
Coda's RPC2 system.
(This item is displayed on
page 504 in the print version)
Another feature of RPC2 that
makes it different from other RPC systems is its support for multicasting. An
important design issue in Coda is that servers keep track of which clients have
a local copy of a file. When a file is modified, a server invalidates local
copies by notifying the appropriate clients through an RPC. Clearly, if a
server can notify only one client at a time, invalidating all clients may take
some time, as illustrated in Fig. 11-9(a).
[Page 504]
Figure 11-9. (a) Sending an
invalidation message one at a time. (b) Sending invalidation messages in
parallel.
[
The problem is caused by the
fact that an RPC may occasionally fail. Invalidating files in a strict
sequential order may be delayed considerably because the server cannot reach a
possibly crashed client, but will give up on that client only after a
relatively long expiration time. Meanwhile, other clients will still be reading
from their local copies.
An alternative (and better)
solution is shown in Fig. 11-9(b). Here, instead of invalidating each copy one
by one, the server sends an invalidation message to all clients at the same
time. As a consequence, all nonfailing clients are notified in the same time as
it would take to do an immediate RPC. Also, the server notices within the usual
expiration time that certain clients are failing to respond to the RPC, and can
declare such clients as being crashed.
[Page 505]
Parallel RPCs are
implemented by means of the MultiRPC system, which is part of the RPC2 package
(Satyanarayanan and Siegel, 1990). An important aspect of MultiRPC is that the
parallel invocation of RPCs is fully transparent to the callee. In other words,
the receiver of a MultiRPC call cannot distinguish that call from a normal RPC.
At the caller's side, parallel execution is also largely transparent. For
example, the semantics of MultiRPC in the presence of failures are much the
same as that of a normal RPC. Likewise, the side-effect mechanisms can be used
in the same way as before.
MultiRPC is implemented by
essentially executing multiple RPCs in parallel. This means that the caller
explicitly sends an RPC request to each recipient. However, instead of
immediately waiting for a response, it defers blocking until all requests have
been sent. In other words, the caller invokes a number of one-way RPCs, after
which it blocks until all responses have been received from the nonfailing
recipients. An alternative approach to parallel execution of RPCs in MultiRPC
is provided by setting up a multicast group, and sending an RPC to all group
members using IP multicast.
11.3.3. File-Oriented
Communication in Plan 9
Finally, it is worth
mentioning a completely different approach to handling communication in
distributed file systems. Plan 9 (Pike et al., 1995). is not so much a
distributed file system, but rather a file-based distributed system. All
resources are accessed in the same way, namely with file-like syntax and
operations, including even resources such as processes and network interfaces.
This idea is inherited from UNIX, which also attempts to offer file-like
interfaces to resources, but it has been exploited much further and more
consistently in Plan 9. To illustrate, network interfaces are represented by a
file system, in this case consisting of a collection of special files. This
approach is similar to UNIX, although network interfaces in UNIX are
represented by files and not file systems. (Note that a file system in this
context is again the logical block device containing all the data and metadata that
comprise a collection of files.) In Plan 9, for example, an individual TCP
connection is represented by a subdirectory consisting of the files shown in
Fig. 11-10.
Figure 11-10. Files
associated with a single TCP connection in Plan 9.
(This item is displayed on
page 506 in the print version)
|
File |
Description |
|
ctl |
Used to write
protocol-specific control commands |
|
data |
Used to read and write
data |
|
listen |
Used to accept incoming
connection setup requests |
|
local |
Provides information on
the caller's side of the connection |
|
remote |
Provides information on
the other side of the connection |
|
status |
Provides diagnostic
information on the current status of the connection |
The file ctl is used to send
control commands to the connection. For example, to open a telnet session to a
machine with IP address 192.31.231.42 using port 23, requires that the sender
writes the text string "connect 192.31.231.42!23" to file ctl. The
receiver would previously have written the string "announce 23" to
its own ctl file, indicating that it can accept incoming session requests.
The data file is used to
exchange data by simply performing read and write operations. These operations
follow the usual UNIX semantics for file operations.
[Page 506]
For example, to write data
to a connection, a process simply invokes the operation
res = write(fd, buf,
nbytes);
where fd is the file
descriptor returned after opening the data file, buf is a pointer to a buffer
containing the data to be written, and nbytes is the number of bytes that
should be extracted from the buffer. The number of bytes actually written is
returned and stored in the variable res.
The file listen is used to
wait for connection setup requests. After a process has announced its
willingness to accept new connections, it can do a blocking read on file
listen. If a request comes in, the call returns a file descriptor to a new ctl
file corresponding to a newly-created connection directory. It is thus seen how
a completely file-oriented approach toward communication can be realized.
11.4. Naming
Naming arguably plays an
important role in distributed file systems. In virtually all cases, names are
organized in a hierarchical name space like those we discussed in Chap. 5. In
the following we will again consider NFS as a representative for how naming is
often handled in distributed file systems.
11.4.1. Naming in NFS
The fundamental idea
underlying the NFS naming model is to provide clients complete transparent
access to a remote file system as maintained by a server. This transparency is
achieved by letting a client be able to mount a remote file system into its own
local file system, as shown in Fig. 11-11.
Figure 11-11. Mounting (part
of) a remote file system in NFS.
(This item is displayed on
page 507 in the print version)
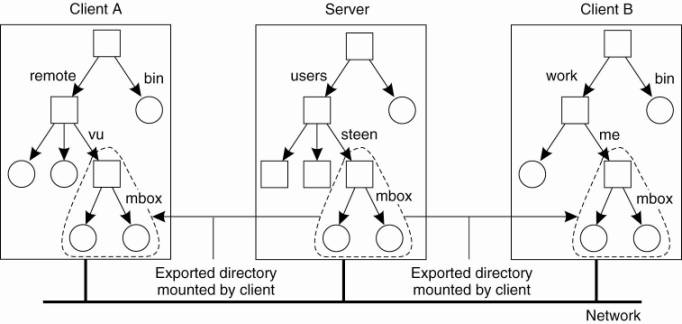
Instead of mounting an
entire file system, NFS allows clients to mount only part of a file system, as
also shown in Fig. 11-11. A server is said to export a directory when it makes
that directory and its entries available to clients. An exported directory can
be mounted into a client's local name space.
[Page 507]
This design approach has a
serious implication: in principle, users do not share name spaces. As shown in
Fig. 11-11, the file named /remote/vu/mbox at client A is named /work/me/mbox
at client B. A file's name therefore depends on how clients organize their own
local name space, and where exported directories are mounted. The drawback of
this approach in a distributed file system is that sharing files becomes much harder.
For example, Alice cannot tell Bob about a file using the name she assigned to
that file, for that name may have a completely different meaning in Bob's name
space of files.
There are several ways to
solve this problem, but the most common one is to provide each client with a
name space that is partly standardized. For example, each client may be using
the local directory /usr/bin to mount a file system containing a standard
collection of programs that are available to everyone. Likewise, the directory
/local may be used as a standard to mount a local file system that is located
on the client's host.
An NFS server can itself
mount directories that are exported by other servers. However, it is not
allowed to export those directories to its own clients. Instead, a client will
have to explicitly mount such a directory from the server that maintains it, as
shown in Fig. 11-12. This restriction comes partly from simplicity. If a server
could export a directory that it mounted from another server, it would have to
return special file handles that include an identifier for a server. NFS does
not support such file handles.
Figure 11-12. Mounting
nested directories from multiple servers in NFS.
(This item is displayed on
page 508 in the print version)
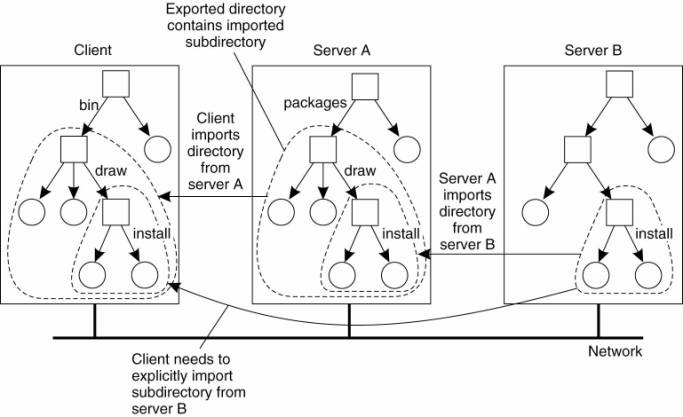
To explain this point in
more detail, assume that server A hosts a file system FSA from which it exports
the directory /packages. This directory contains a subdirectory /draw that acts
as a mount point for a file system FSB that is exported by server B and mounted
by A. Let A also export /packages/draw to its own clients, and assume that a
client has mounted /packages into its local directory /bin as shown in Fig.
11-12.
[Page 508]
If name resolution is
iterative (as is the case in NFSv3), then to resolve the name
/bin/draw/install, the client contacts server A when it has locally resolved
/bin and requests A to return a file handle for directory /draw. In that case,
server A should return a file handle that includes an identifier for server B,
for only B can resolve the rest of the path name, in this case /install. As we
have said, this kind of name resolution is not supported by NFS.
Name resolution in NFSv3
(and earlier versions) is strictly iterative in the sense that only a single
file name at a time can be looked up. In other words, resolving a name such as
/bin/draw/install requires three separate calls to the NFS server. Moreover,
the client is fully responsible for implementing the resolution of a path name.
NFSv4 also supports recursive name lookups. In this case, a client can pass a
complete path name to a server and request that server to resolve it.
There is another peculiarity
with NFS name lookups that has been solved with version 4. Consider a file
server hosting several file systems. With the strict iterative name resolution
in version 3, whenever a lookup was done for a directory on which another file
system was mounted, the lookup would return the file handle of the directory.
Subsequently reading that directory would return its original content, not that
of the root directory of the mounted file system.
[Page 509]
To explain, assume that in
our previous example that both file systems FSA and FSB are hosted by a single
server. If the client has mounted /packages into its local directory /bin, then
looking up the file name draw at the server would return the file handle for
draw. A subsequent call to the server for listing the directory entries of draw
by means of readdir would then return the list of directory entries that were
originally stored in FSA in subdirectory /packages/draw. Only if the client had
also mounted file system FSB, would it be possible to properly resolve the path
name draw/install relative to /bin.
NFSv4 solves this problem by
allowing lookups to cross mount points at a server. In particular, lookup
returns the file handle of the mounted directory instead of that of the
original directory. The client can detect that the lookup has crossed a mount
point by inspecting the file system identifier of the looked up file. If
required, the client can locally mount that file system as well.
File Handles
A file handle is a reference
to a file within a file system. It is independent of the name of the file it
refers to. A file handle is created by the server that is hosting the file
system and is unique with respect to all file systems exported by the server.
It is created when the file is created. The client is kept ignorant of the
actual content of a file handle; it is completely opaque. File handles were 32
bytes in NFS version 2, but were variable up to 64 bytes in version 3 and 128
bytes in version 4. Of course, the length of a file handle is not opaque.
Ideally, a file handle is
implemented as a true identifier for a file relative to a file system. For one
thing, this means that as long as the file exists, it should have one and the
same file handle. This persistence requirement allows a client to store a file
handle locally once the associated file has been looked up by means of its
name. One benefit is performance: as most file operations require a file handle
instead of a name, the client can avoid having to look up a name repeatedly
before every file operation. Another benefit of this approach is that the
client can now access the file independent of its (current) names.
Because a file handle can be
locally stored by a client, it is also important that a server does not reuse a
file handle after deleting a file. Otherwise, a client may mistakenly access
the wrong file when it uses its locally stored file handle.
Note that the combination of
iterative name lookups and not letting a lookup operation allow crossing a
mount point introduces a problem with getting an initial file handle. In order
to access files in a remote file system, a client will need to provide the
server with a file handle of the directory where the lookup should take place,
along with the name of the file or directory that is to be resolved. NFSv3
solves this problem through a separate mount protocol, by which a client
actually mounts a remote file system. After mounting, the client is passed back
the root file handle of the mounted file system, which it can subsequently use
as a starting point for looking up names.
[Page 510]
In NFSv4, this problem is
solved by providing a separate operation putrootfh that tells the server to
solve all file names relative to the root file handle of the file system it
manages. The root file handle can be used to look up any other file handle in
the server's file system. This approach has the additional benefit that there
is no need for a separate mount protocol. Instead, mounting can be integrated
into the regular protocol for looking up files. A client can simply mount a
remote file system by requesting the server to resolve names relative to the
file system's root file handle using putrootfh.
Automounting
As we mentioned, the NFS
naming model essentially provides users with their own name space. Sharing in
this model may become difficult if users name the same file differently. One
solution to this problem is to provide each user with a local name space that
is partly standardized, and subsequently mounting remote file systems the same
for each user.
Another problem with the NFS
naming model has to do with deciding when a remote file system should be
mounted. Consider a large system with thousands of users. Assume that each user
has a local directory /home that is used to mount the home directories of other
users. For example, Alice's home directory may be locally available to her as
/home/alice, although the actual files are stored on a remote server. This
directory can be automatically mounted when Alice logs into her workstation. In
addition, she may have access to Bob's public files by accessing Bob's
directory through /home/bob.
The question, however, is
whether Bob's home directory should also be mounted automatically when Alice
logs in. The benefit of this approach would be that the whole business of
mounting file systems would be transparent to Alice. However, if this policy
were followed for every user, logging in could incur a lot of communication and
administrative overhead. In addition, it would require that all users are known
in advance. A much better approach is to transparently mount another user's
home directory on demand, that is, when it is first needed.
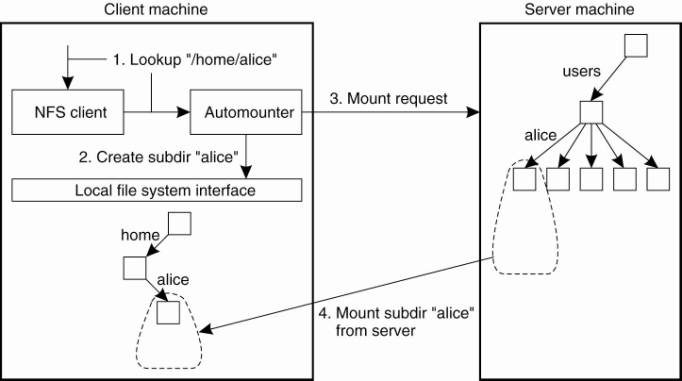
On-demand mounting of a
remote file system (or actually an exported directory) is handled in NFS by an
automounter, which runs as a separate process on the client's machine. The
principle underlying an automounter is relatively simple. Consider a simple
automounter implemented as a user-level NFS server on a UNIX operating system.
For alternative implementations, see Callaghan (2000).
Assume that for each user,
the home directories of all users are available through the local directory
/home, as described above. When a client machine boots, the automounter starts
with mounting this directory. The effect of this local mount is that whenever a
program attempts to access /home, the UNIX kernel will forward a lookup
operation to the NFS client, which in this case, will forward the request to
the automounter in its role as NFS server, as shown in Fig. 11-13.
Figure 11-13. A simple
automounter for NFS.
(This item is displayed on
page 511 in the print version)
[Page 511]
For example, suppose that
Alice logs in. The login program will attempt to read the directory /home/alice
to find information such as login scripts. The automounter will thus receive
the request to look up subdirectory /home/alice, for which reason it first
creates a subdirectory /alice in /home. It then looks up the NFS server that
exports Alice's home directory to subsequently mount that directory in
/home/alice. At that point, the login program can proceed.
The problem with this
approach is that the automounter will have to be involved in all file
operations to guarantee transparency. If a referenced file is not locally
available because the corresponding file system has not yet been mounted, the
automounter will have to know. In particular, it will need to handle all read
and write requests, even for file systems that have already been mounted. This
approach may incur a large performance problem. It would be better to have the
auto mounter only mount/unmount directories, but otherwise stay out of the
loop.
A simple solution is to let
the automounter mount directories in a special subdirectory, and install a
symbolic link to each mounted directory. This approach is shown in Fig. 11-14.
Figure 11-14. Using symbolic
links with automounting.
(This item is displayed on
page 512 in the print version)

In our example, the user
home directories are mounted as subdirectories of /tmp_mnt. When Alice logs in,
the automounter mounts her home directory in /tmp_mnt/home/alice and creates a
symbolic link /home/alice that refers to that subdirectory. In this case,
whenever Alice executes a command such as
ls –l /home/alice
the NFS server that exports
Alice's home directory is contacted directly without further involvement of the
automounter.
[Page 512]
11.4.2. Constructing a
Global Name Space
Large distributed systems
are commonly constructed by gluing together various legacy systems into one
whole. When it comes to offering shared access to files, having a global name
space is about the minimal glue that one would like to have. At present, file
systems are mostly opened for sharing by using primitive means such as access through
FTP. This approach, for example, is generally used in Grid computing.
More sophisticated
approaches are followed by truly wide-area distributed file systems, but these
often require modifications to operating system kernels in order to be adopted.
Therefore, researchers have been looking for approaches to integrate existing
file systems into a single, global name space but using only user-level
solutions. One such system, simply called Global Name Space Service (GNS) is
proposed by Anderson et al. (2004).
GNS does not provide
interfaces to access files. Instead, it merely provides the means to set up a
global name space in which several existing name spaces have been merged. To
this end, a GNS client maintains a virtual tree in which each node is either a
directory or a junction. A junction is a special node that indicates that name
resolution is to be taken over by another process, and as such bears some
resemblance with a mount point in traditional file system. There are five
different types of junctions, as shown in Fig. 11-15.
Figure 11-15. Junctions in
GNS.
(This item is displayed on
page 513 in the print version)
|
Junction |
Description |
|
GNS junction |
Refers to another GNS
instance |
|
Logical file-system name |
Reference to subtree to be
looked up in a location service |
|
Logical file name |
Reference to a file to be
looked up in a location service |
|
Physical file-system name |
Reference to directly
remote-accessible subtree |
|
Physical file name |
Reference to directly
remote-accessible file |
A GNS junction simply refers
to another GNS instance, which is just another virtual tree hosted at possibly
another process. The two logical junctions contain information that is needed
to contact a location service. The latter will provide the contact address for
accessing a file system and a file, respectively. A physical file-system name
refers to a file system at another server, and corresponds largely to a contact
address that a logical junction would need. For example, a URL such as
ftp://ftp.cs.vu.nl/pub would contain all the information to access files at the
indicated FTP server. Analogously, a URL such as http://www.cs.vu.nl/index.htm
is a typical example of a physical file name.
[Page 513]
Obviously, a junction should
contain all the information needed to continue name resolution. There are many
ways of doing this, but considering that there are so many different file
systems, each specific junction will require its own implementation.
Fortunately, there are also many common ways of accessing remote files,
including protocols for communicating with NFS servers, FTP servers, and
Windows-based machines (notably CIFS).
GNS has the advantage of
decoupling the naming of files from their actual location. In no way does a
virtual tree relate to where files and directories are physically placed. In
addition, by using a location service it is also possible to move files around
without rendering their names unresolvable. In that case, the new physical
location needs to be registered at the location service. Note that this is completely
the same as what we have discussed in Chap. 5.
11.5. Synchronization
Let us now continue our
discussion by focusing on synchronization issues in distributed file systems.
There are various issues that require our attention. In the first place,
synchronization for file systems would not be an issue if files were not shared.
However, in a distributed system, the semantics of file sharing becomes a bit
tricky when performance issues are at stake. To this end, different solutions
have been proposed of which we discuss the most important ones next.
11.5.1. Semantics of File
Sharing
When two or more users share
the same file at the same time, it is necessary to define the semantics of
reading and writing precisely to avoid problems. In single-processor systems
that permit processes to share files, such as UNIX, the semantics normally
state that when a read operation follows a write operation, the read returns
the value just written, as shown in Fig. 11-16(a). Similarly, when two writes
happen in quick succession, followed by a read, the value read is the value
stored by the last write. In effect, the system enforces an absolute time
ordering on all operations and always returns the most recent value. We will
refer to this model as UNIX semantics. This model is easy to understand and
straightforward to implement.
[Page 514]
Figure 11-16. (a) On a
single processor, when a read follows a write, the value returned by the read
is the value just written. (b) In a distributed system with caching, obsolete
values may be returned.


In a distributed system,
UNIX semantics can be achieved easily as long as there is only one file server
and clients do not cache files. All reads and writes go directly to the file
server, which processes them strictly sequentially. This approach gives UNIX
semantics (except for the minor problem that network delays may cause a read
that occurred a microsecond after a write to arrive at the server first and
thus gets the old value).
In practice, however, the
performance of a distributed system in which all file requests must go to a
single server is frequently poor. This problem is often solved by allowing
clients to maintain local copies of heavily-used files in their private (local)
caches. Although we will discuss the details of file caching below, for the
moment it is sufficient to point out that if a client locally modifies a cached
file and shortly thereafter another client reads the file from the server, the
second client will get an obsolete file, as illustrated in Fig. 11-16(b).
[Page 515]
One way out of this
difficulty is to propagate all changes to cached files back to the server
immediately. Although conceptually simple, this approach is inefficient. An
alternative solution is to relax the semantics of file sharing. Instead of
requiring a read to see the effects of all previous writes, one can have a new
rule that says: "Changes to an open file are initially visible only to the
process (or possibly machine) that modified the file. Only when the file is
closed are the changes made visible to other processes (or machines)." The
adoption of such a rule does not change what happens in Fig. 11-16(b), but it
does redefine the actual behavior (B getting the original value of the file) as
being the correct one. When A closes the file, it sends a copy to the server,
so that subsequent reads get the new value, as required.
This rule is
widely-implemented and is known as session semantics. Most distributed file
systems implement session semantics. This means that although in theory they
follow the remote access model of Fig. 11-1(a), most implementations make use
of local caches, effectively implementing the upload/download model of Fig.
11-1(b).
Using session semantics
raises the question of what happens if two or more clients are simultaneously
caching and modifying the same file. One solution is to say that as each file
is closed in turn, its value is sent back to the server, so the final result
depends on whose close request is most recently processed by the server. A less
pleasant, but easier to implement alternative is to say that the final result
is one of the candidates, but leave the choice of which one unspecified.
A completely different
approach to the semantics of file sharing in a distributed system is to make
all files immutable. There is thus no way to open a file for writing. In
effect, the only operations on files are create and read.
What is possible is to
create an entirely new file and enter it into the directory system under the
name of a previous existing file, which now becomes inaccessible (at least
under that name). Thus although it becomes impossible to modify the file x, it
remains possible to replace x by a new file atomically. In other words,
although files cannot be updated, directories can be. Once we have decided that
files cannot be changed at all, the problem of how to deal with two processes,
one of which is writing on a file and the other of which is reading it, just
disappears, greatly simplifying the design.
What does remain is the
problem of what happens when two processes try to replace the same file at the
same time. As with session semantics, the best solution here seems to be to
allow one of the new files to replace the old one, either the last one or
nondeterministically.
A somewhat stickier problem
is what to do if a file is replaced while another process is busy reading it.
One solution is to somehow arrange for the reader to continue using the old
file, even if it is no longer in any directory, analogous to the way UNIX
allows a process that has a file open to continue using it, even after it has
been deleted from all directories. Another solution is to detect that the file
has changed and make subsequent attempts to read from it fail.
[Page 516]
A fourth way to deal with
shared files in a distributed system is to use atom\%ic transactions. To
summarize briefly, to access a file or a group of files, a process first
executes some type of BEGIN_TRANSACTION primitive to signal that what follows
must be executed indivisibly. Then come system calls to read and write one or
more files. When the requested work has been completed, an END_TRANSACTION
primitive is executed. The key property of this method is that the system
guarantees that all the calls contained within the transaction will be carried
out in order, without any interference from other, concurrent transactions. If
two or more transactions start up at the same time, the system ensures that the
final result is the same as if they were all run in some (undefined) sequential
order.
In Fig. 11-17 we summarize
the four approaches we have discussed for dealing with shared files in a
distributed system.
Figure 11-17. Four ways of
dealing with the shared files in a distributed system.
|
Method |
Comment |
|
UNIX semantics |
Every operation on a file
is instantly visible to all processes |
|
Session semantics |
No changes are visible to
other processes until the file is closed |
|
Immutable files |
No updates are possible;
simplifies sharing and replication |
|
Transactions |
All changes occur
atomically |
11.5.2. File Locking
Notably in client-server
architectures with stateless servers, we need additional facilities for
synchronizing access to shared files. The traditional way of doing this is to
make use of a lock manager. Without exception, a lock manager follows the
centralized locking scheme as we discussed in Chap. 6.
However, matters are not as
simple as we just sketched. Although a central lock manager is generally
deployed, the complexity in locking comes from the need to allow concurrent
access to the same file. For this reason, a great number of different locks
exist, and moreover, the granularity of locks may also differ. Let us consider
NFSv4 again.
Conceptually, file locking
in NFSv4 is simple. There are essentially only four operations related to
locking, as shown in Fig. 11-18. NFSv4 distinguishes read locks from write
locks. Multiple clients can simultaneously access the same part of a file
provided they only read data. A write lock is needed to obtain exclusive access
to modify part of a file.
Figure 11-18. NFSv4
operations related to file locking.
(This item is displayed on
page 517 in the print version)
|
Operation |
Description |
|
Lock |
Create a lock for a range
of bytes |
|
Lockt |
Test whether a conflicting
lock has been granted |
|
Locku |
Remove a lock from a range
of bytes |
|
Renew |
Renew the lease on a
specified lock |
Operation lock is used to
request a read or write lock on a consecutive range of bytes in a file. It is a
nonblocking operation; if the lock cannot be granted due to another conflicting
lock, the client gets back an error message and has to poll the server at a
later time. There is no automatic retry. Alternatively, the client can request
to be put on a FIFO-ordered list maintained by the server. As soon as the conflicting
lock has been removed, the server will grant the next lock to the client at the
top of the list, provided it polls the server before a certain time expires.
This approach prevents the server from having to notify clients, while still
being fair to clients whose lock request could not be granted because grants
are made in FIFO order.
[Page 517]
The lockt operation is used
to test whether a conflicting lock exists. For example, a client can test
whether there are any read locks granted on a specific range of bytes in a
file, before requesting a write lock for those bytes. In the case of a conflict,
the requesting client is informed exactly who is causing the conflict and on
which range of bytes. It can be implemented more efficiently than lock, because
there is no need to attempt to open a file.
Removing a lock from a file
is done by means of the locku operation.
Locks are granted for a
specific time (determined by the server). In other words, they have an
associated lease. Unless a client renews the lease on a lock it has been
granted, the server will automatically remove it. This approach is followed for
other server-provided resources as well and helps in recovery after failures.
Using the renew operation, a client requests the server to renew the lease on
its lock (and, in fact, other resources as well).
In addition to these
operations, there is also an implicit way to lock a file, referred to as share
reservation. Share reservation is completely independent from locking, and can
be used to implement NFS for Windows-based systems. When a client opens a file,
it specifies the type of access it requires (namely READ, WRITE, or BOTH), and
which type of access the server should deny other clients (NONE, READ, WRITE,
or BOTH). If the server cannot meet the client's requirements, the open
operation will fail for that client. In Fig. 11-19 we show exactly what happens
when a new client opens a file that has already been successfully opened by
another client. For an already opened file, we distinguish two different state
variables. The access state specifies how the file is currently being accessed
by the current client. The denial state specifies what accesses by new clients
are not permitted.
Figure 11-19. The result of
an open operation with share reservations in NFS. (a) When the client requests
shared access given the current denial state. (b) When the client requests a
denial state given the current file access state.
(This item is displayed on
page 518 in the print version)
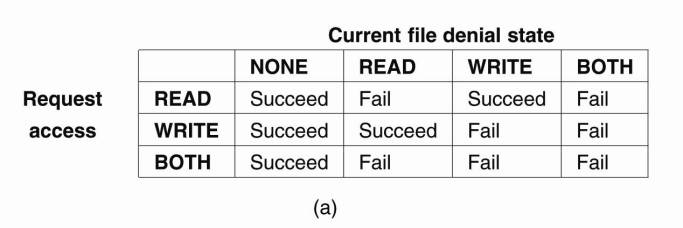

In Fig. 11-19(a), we show
what happens when a client tries to open a file requesting a specific type of
access, given the current denial state of that file. Likewise, Fig. 11-19(b)
shows the result of opening a file that is currently being accessed by another
client, but now requesting certain access types to be disallowed.
[Page 518]
NFSv4 is by no means an
exception when it comes to offering synchronization mechanisms for shared
files. In fact, it is by now accepted that any simple set of primitives such as
only complete-file locking, reflects poor design. Complexity in locking schemes
comes mostly from the fact that a fine granularity of locking is required to
allow for concurrent access to shared files. Some attempts to reduce complexity
while keeping performance have been taken [see, e.g., Burns et al. (2001)], but
the situation remains somewhat unsatisfactory. In the end, we may be looking at
completely redesigning our applications for scalability rather than trying to
patch situations that come from wanting to share data the way we did in
nondistributed systems.
11.5.3. Sharing Files in
Coda
The session semantics in NFS
dictate that the last process that closes a file will have its changes
propagated to the server; any updates in concurrent, but earlier sessions will
be lost. A somewhat more subtle approach can also be taken. To accommodate file
sharing, the Coda file system (Kistler and Satyanaryanan, 1992) uses a special
allocation scheme that bears some similarities to share reservations in NFS. To
understand how the scheme works, the following is important. When a client
successfully opens a file f, an entire copy of f is transferred to the client's
machine. The server records that the client has a copy of f. So far, this
approach is similar to open delegation in NFS.
[Page 519]
Now suppose client A has
opened file f for writing. When another client B wants to open f as well, it
will fail. This failure is caused by the fact that the server has recorded that
client A might have already modified f. On the other hand, had client A opened
f for reading, an attempt by client B to get a copy from the server for reading
would succeed. An attempt by B to open for writing would succeed as well.
Now consider what happens
when several copies of f have been stored locally at various clients. Given
what we have just said, only one client will be able to modify f. If this
client modifies f and subsequently closes the file, the file will be
transferred back to the server. However, every other client may proceed to read
its local copy despite the fact that the copy is actually outdated.
The reason for this
apparently inconsistent behavior is that a session is treated as a transaction
in Coda. Consider Fig. 11-20, which shows the time line for two processes, A
and B. Assume A has opened f for reading, leading to session SA. Client B has opened
f for writing, shown as session SB.
Figure 11-20. The
transactional behavior in sharing files in Coda.

When B closes session SB, it
transfers the updated version of f to the server, which will then send an
invalidation message to A. A will now know that it is reading from an older
version of f. However, from a transactional point of view, this really does not
matter because session SA could be considered to have been scheduled before
session SB.
11.6. Consistency and
Replication
Caching and replication play
an important role in distributed file systems, most notably when they are
designed to operate over wide-area networks. In what follows, we will take a
look at various aspects related to client-side caching of file data, as well as
the replication of file servers. Also, we consider the role of replication in
peer-to-peer file-sharing systems.
[Page 520]
11.6.1. Client-Side Caching
To see how client-side
caching is deployed in practice, we return to our example systems NFS and Coda.
Caching in NFS
Caching in NFSv3 has been
mainly left outside of the protocol. This approach has led to the
implementation of different caching policies, most of which never guaranteed
consistency. At best, cached data could be stale for a few seconds compared to
the data stored at a server. However, implementations also exist that allowed
cached data to be stale for 30 seconds without the client knowing. This state
of affairs is less than desirable.
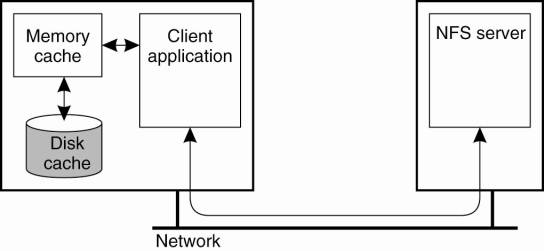
NFSv4 solves some of these
consistency problems, but essentially still leaves cache consistency to be
handled in an implementation-dependent way. The general caching model that is
assumed by NFS is shown in Fig. 11-21. Each client can have a memory cache that
contains data previously read from the server. In addition, there may also be a
disk cache that is added as an extension to the memory cache, using the same
consistency parameters.
Figure 11-21. Client-side
caching in NFS.
Typically, clients cache
file data, attributes, file handles, and directories. Different strategies
exist to handle consistency of the cached data, cached attributes, and so on.
Let us first take a look at caching file data.
NFSv4 supports two different
approaches for caching file data. The simplest approach is when a client opens
a file and caches the data it obtains from the server as the result of various
read operations. In addition, write operations can be carried out in the cache
as well. When the client closes the file, NFS requires that if modifications
have taken place, the cached data must be flushed back to the server. This
approach corresponds to implementing session semantics as discussed earlier.
[Page 521]
Once (part of) a file has
been cached, a client can keep its data in the cache even after closing the
file. Also, several clients on the same machine can share a single cache. NFS
requires that whenever a client opens a previously closed file that has been
(partly) cached, the client must immediately revalidate the cached data. Revalidation
takes place by checking when the file was last modified and invalidating the
cache in case it contains stale data.
In NFSv4 a server may
delegate some of its rights to a client when a file is opened. Open delegation
takes place when the client machine is allowed to locally handle open and close
operations from other clients on the same machine. Normally, the server is in
charge of checking whether opening a file should succeed or not, for example,
because share reservations need to be taken into account. With open delegation,
the client machine is sometimes allowed to make such decisions, avoiding the
need to contact the server.
For example, if a server has
delegated the opening of a file to a client that requested write permissions,
file locking requests from other clients on the same machine can also be
handled locally. The server will still handle locking requests from clients on
other machines, by simply denying those clients access to the file. Note that
this scheme does not work in the case of delegating a file to a client that
requested only read permissions. In that case, whenever another local client
wants to have write permissions, it will have to contact the server; it is not
possible to handle the request locally.
An important consequence of
delegating a file to a client is that the server needs to be able to recall the
delegation, for example, when another client on a different machine needs to
obtain access rights to the file. Recalling a delegation requires that the
server can do a callback to the client, as illustrated in Fig. 11-22.
Figure 11-22. Using the
NFSv4 callback mechanism to recall file delegation.
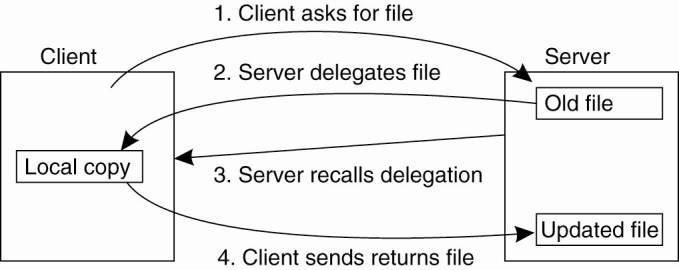
A callback is implemented in
NFS using its underlying RPC mechanisms. Note, however, that callbacks require
that the server keeps track of clients to which it has delegated a file. Here,
we see another example where an NFS server can no longer be implemented in a
stateless manner. Note, however, that the combination of delegation and
stateful servers may lead to various problems in the presence of client and
server failures. For example, what should a server do when it had delegated a
file to a now unresponsive client? As we discuss shortly, leases will generally
form an adequate practical solution.
[Page 522]
Clients can also cache
attribute values, but are largely left on their own when it comes to keeping
cached values consistent. In particular, attribute values of the same file
cached by two different clients may be different unless the clients keep these
attributes mutually consistent. Modifications to an attribute value should be
immediately forwarded to the server, thus following a write-through cache
coherence policy.
A similar approach is
followed for caching file handles (or rather, the name-to-file handle mapping)
and directories. To mitigate the effects of inconsistencies, NFS uses leases on
cached attributes, file handles, and directories. After some time has elapsed,
cache entries are thus automatically invalidated and revalidation is needed before
they are used again.
Client-Side Caching in Coda
Client-side caching is
crucial to the operation of Coda for two reasons. First, caching is done to
achieve scalability. Second, caching provides a higher degree of fault
tolerance as the client becomes less dependent on the availability of the
server. For these two reasons, clients in Coda always cache entire files. In
other words, when a file is opened for either reading or writing, an entire
copy of the file is transferred to the client, where it is subsequently cached.
Unlike many other
distributed file systems, cache coherence in Coda is maintained by means of
callbacks. We already came across this phenomenon when discussing file-sharing
semantics. For each file, the server from which a client had fetched the file
keeps track of which clients have a copy of that file cached locally. A server
is said to record a callback promise for a client. When a client updates its
local copy of the file for the first time, it notifies the server, which, in
turn, sends an invalidation message to the other clients. Such an invalidation
message is called a callback break, because the server will then discard the
callback promise it held for the client it just sent an invalidation.
The interesting aspect of
this scheme is that as long as a client knows it has an outstanding callback
promise at the server, it can safely access the file locally. In particular,
suppose a client opens a file and finds it is still in its cache. It can then
use that file provided the server still has a callback promise on the file for
that client. The client will have to check with the server if that promise
still holds. If so, there is no need to transfer the file from the server to
the client again.
This approach is illustrated
in Fig. 11-23, which is an extension of Fig. 11-20. When client A starts
session SA, the server records a callback promise. The same happens when B
starts session SB. However, when B closes SB, the server breaks its promise to
callback client A by sending A a callback break. Note that due to the
transactional semantics of Coda, when client A closes session SA, nothing
special happens; the closing is simply accepted as one would expect.
[Page 523]
Figure 11-23. The use of
local copies when opening a session in Coda.
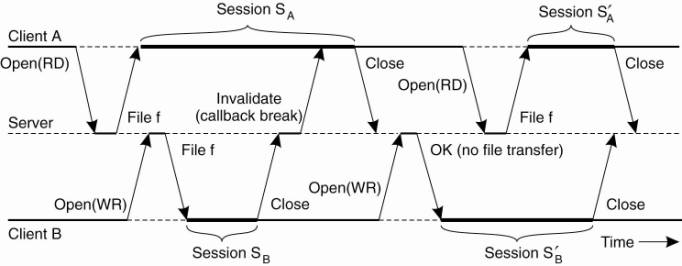
The consequence is that when
A later wants to open session , it will find its local copy of f to be invalid,
so that it will have to fetch the latest version from the server. On the other
hand, when B opens session , it will notice that the server still has an
outstanding callback promise implying that B can simply re-use the local copy
it still has from session SB.
Client-Side Caching for
Portable Devices
One important development
for many distributed systems is that many storage devices can no longer be assumed
to be permanently connected to the system through a network. Instead, users
have various types of storage devices that are semi-permanently connected, for
example, through cradles or docking stations. Typical examples include PDAs,
laptop devices, but also portable multimedia devices such as movie and audio
players.
In most cases, an explicit
upload/download model is used for maintaining files on portable storage
devices. Matters can be simplified if the storage device is viewed as part of a
distributed file system. In that case, whenever a file needs to be accessed, it
may be fetched from the local device or over the connection to the rest of the
system. These two cases need to be distinguished.
Tolia et al. (2004) propose
to take a very simple approach by storing locally a cryptographic hash of the
data contained in files. These hashes are stored on the portable device and
used to redirect requests for associated content. For example, when a directory
listing is stored locally, instead of storing the data of each listed file,
only the computed has is stored. Then, when a file is fetched, the system will
first check whether the file is locally available and up-to-date. Note that a
stale file will have a different hash than the one stored in the directory
listing. If the file is locally available, it can be returned to the client,
otherwise a data transfer will need to take place.
[Page 524]
Obviously, when a device is
disconnected it will be impossible to transfer any data. Various techniques
exist to ensure with high probability that likely to-be-used files are indeed
stored locally on the device. Compared to the on-demand data transfer approach
inherent to most caching schemes, in these cases we would need to deploy
file-prefetching techniques. However, for many portable storage devices, we can
expect that the user will use special programs to pre-install files on the
device.
11.6.2. Server-Side
Replication
In contrast to client-side
caching, server-side replication in distributed file systems is less common. Of
course, replication is applied when availability is at stake, but from a
performance perspective it makes more sense to deploy caches in which a whole
file, or otherwise large parts of it, are made locally available to a client.
An important reason why client-side caching is so popular is that practice
shows that file sharing is relatively rare. When sharing takes place, it is
often only for reading data, in which case caching is an excellent solution.
Another problem with
server-side replication for performance is that a combination of a high degree
of replication and a low read/write ratio may actually degrade performance.
This is easy to understand when realizing that every update operation needs to
be carried out at every replica. In other words, for an N-fold replicated file,
a single update request will lead to an N-fold increase of update operations.
Moreover, concurrent updates need to be synchronized, leading to more
communication and further performance reduction.
For these reasons, file
servers are generally replicated only for fault tolerance. In the following, we
illustrate this type of replication for the Coda file system.
Server Replication in Coda
Coda allows file servers to
be replicated. As we mentioned, the unit of replication is a collection of
files called a volume. In essence, a volume corresponds to a UNIX disk
partition, that is, a traditional file system like the ones directly supported
by operating systems, although volumes are generally much smaller. The
collection of Coda servers that have a copy of a volume, are known as that
volume's Volume Storage Group, or simply VSG. In the presence of failures, a
client may not have access to all servers in a volume's VSG. A client's
Accessible Volume Storage Group (AVSG) for a volume consists of those servers
in that volume's VSG that the client can contact at the moment. If the AVSG is
empty, the client is said to be disconnected.
[Page 525]
Coda uses a replicated-write
protocol to maintain consistency of a replicated volume. In particular, it uses
a variant of Read-One, Write-All (ROWA), which was explained in Chap. 7. When a
client needs to read a file, it contacts one of the members in its AVSG of the
volume to which that file belongs. However, when closing a session on an updated
file, the client transfers it in parallel to each member in the AVSG. This
parallel transfer is accomplished by means of MultiRPC as explained before.
This scheme works fine as
long as there are no failures, that is, for each client, that client's AVSG of
a volume is the same as its VSG. However, in the presence of failures, things
may go wrong. Consider a volume that is replicated across three servers S1, S2,
and S3. For client A, assume its AVSG covers servers S1 and S2 whereas client B
has access only to server S3, as shown in Fig. 11-24.
Figure 11-24. Two clients
with a different AVSG for the same replicated file.
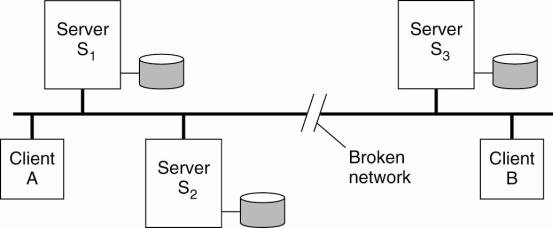
Coda uses an optimistic
strategy for file replication. In particular, both A and B will be allowed to
open a file, f, for writing, update their respective copies, and transfer their
copy back to the members in their AVSG. Obviously, there will be different
versions of f stored in the VSG. The question is how this inconsistency can be
detected and resolved.
The solution adopted by Coda
is deploying a versioning scheme. In particular, a server Si in a VSG maintains
a Coda version vector CVVi(f ) for each file f contained in that VSG. If CVVi(f
)[j ]=k, thenserver Si knows that server Sj has seen at least version k of file
f. CVVi(f)[i] is the number of the current version of f stored at server Si. An
update of f at server Si will lead to an increment of CVVi(f)[i]. Note that
version vectors are completely analogous to the vector timestamps discussed in
Chap. 6.
Returning to our
three-server example, CVVi(f) is initially equal to [1,1,1] for each server Si.
When client A reads f from one of the servers in its AVSG, say S1, it also
receives CVV1(f). After updating f, client A multicasts f to each server in its
AVSG, that is, S1 and S2. Both servers will then record that their respective
copy has been updated, but not that of S3. In other words,
CVV1(f) = CVV2(f) = [2,2,1]
[Page 526]
Meanwhile, client B will be
allowed to open a session in which it receives a copy of f from server S3, and
subsequently update f as well. When closing its session and transferring the
update to S3, server S3 will update its version vector to CVV3(f)=[1,1,2].
When the partition is
healed, the three servers will need to reintegrate their copies of f. By
comparing their version vectors, they will notice that a conflict has occurred
that needs to be repaired. In many cases, conflict resolution can be automated
in an application-dependent way, as discussed in Kumar and Satyanarayanan
(1995). However, there are also many cases in which users will have to assist
in resolving a conflict manually, especially when different users have changed
the same part of the same file in different ways.
11.6.3. Replication in
Peer-to-Peer File Systems
Let us now examine
replication in peer-to-peer file-sharing systems. Here, replication also plays
an important role, notably for speeding up search and look-up requests, but
also to balance load between nodes. An important property in these systems is
that virtually all files are read only. Updates consist only in the form of
adding files to the system. A distinction should be made between unstructured
and structured peer-to-peer systems.
Unstructured Peer-to-Peer
Systems
Fundamental to unstructured
peer-to-peer systems is that looking up data boils down to searching that data
in the network. Effectively, this means that a node will simply have to, for
example, broadcast a search query to its neighbors, from where the query may be
forwarded, and so on. Obviously, searching through broadcasting is generally
not a good idea, and special measures need to be taken to avoid performance
problems. Searching in peer-to-peer systems is discussed extensively in Risson
and Moors (2006).
Independent of the way
broadcasting is limited, it should be clear that if files are replicated,
searching becomes easier and faster. One extreme is to replicate a file at all
nodes, which would imply that searching for any file can be done entirely
local. However, given that nodes have a limited capacity, full replication is
out of the question. The problem is then to find an optimal replication
strategy, where optimality is defined by the number of different nodes that
need to process a specific query before a file is found.
Cohen and Shenker (2002)
have examined this problem, assuming that file replication can be controlled.
In other words, assuming that nodes in an unstructured peer-to-peer system can
be instructed to hold copies of files, what is then the best allocation of file
copies to nodes?
Let us consider two
extremes. One policy is to uniformly distribute n copies of each file across
the entire network. This policy ignores that different files may have different
request rates, that is, that some files are more popular than others. As an
alternative, another policy is to replicate files according to how often they
are searched for: the more popular a file is, the more replicas we create and
distribute across the overlay.
[Page 527]
As a side remark, note that
this last policy may make it very expensive to locate unpopular files. Strange
as this may seem, such searches may prove to be increasingly important from an
economic point of view. The reasoning is simple: with the Internet allowing
fast and easy access to tons of information, exploiting niche markets suddenly
becomes attractive. So, if you are interested in getting the right equipment
for, let's say a recumbent bicycle, the Internet is the place to go to provided
its search facilities will allow you to efficiently discover the appropriate
seller.
Quite surprisingly, it turns
out that the uniform and the popular policy perform just as good when looking
at the average number of nodes that need to be queried. The distribution of
queries is the same in both cases, and such that the distribution of documents
in the popular policy follows the distribution of queries. Moreover, it turns
out that any allocation "between" these two is better. Obtaining such
an allocation is doable, but not trivial.
Replication in unstructured
peer-to-peer systems happens naturally when users download files from others
and subsequently make them available to the community. Controlling these
networks is very difficult in practice, except when parts are controlled by a
single organization. Moreover, as indicated by studies conducted on BitTorrent,
there is also an important social factor when it comes to replicating files and
making them available (Pouwelse et al., 2005). For example, some people show
altruistic behavior, or simply continue to make files no longer available than
strictly necessary after they have completed their download. The question comes
to mind whether systems can be devised that exploit this behavior.
Structured Peer-to-Peer
Systems
Considering the efficiency
of lookup operations in structured peer-to-peer systems, replication is
primarily deployed to balance the load between the nodes. We already
encountered in Chap. 5 how a "structured" form of replication, as
exploited by Ramasubramanian and Sirer (2004b) could even reduce the average
lookup steps to Ο(1). However, when it comes to load balancing, different
approaches need to be explored.
One commonly applied method
is to simply replicate a file along the path that a query has followed from
source to destination. This replication policy will have the effect that most
replicas will be placed close to the node responsible for storing the file, and
will thus indeed offload that node when there is a high request rate. However,
such a replication policy does not take the load of other nodes into account,
and may thus easily lead to an imbalanced system.
[Page 528]
To address these problems,
Gopalakrishnan et al. (2004) propose a different scheme that takes the current
load of nodes along the query route into account. The principal idea is to
store replicas at the source node of a query, and to cache pointers to such
replicas in nodes along the query route from source to destination. More
specifically, when a query from node P to Q is routed through node R, R will
check whether any of its files should be offloaded to P. It does so by simply
looking at its own query load. If R is serving too many lookup requests for
files it is currently storing in comparison to the load imposed on P, it can
ask P to install copies of R's most requested files. This principle is sketched
in Fig. 11-25.
Figure 11-25. Balancing load
in a peer-to-peer system by replication.
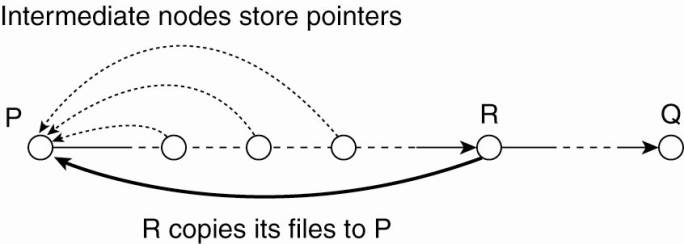
If P can accept file f from
R, each node visited on the route from P to R will install a pointer for f to
P, indicating that a replica of f can be found at P.
Clearly, disseminating
information on where replicas are stored is important for this scheme to work.
Therefore, when routing a query through the overlay, a node may also pass on
information concerning the replicas it is hosting. This information may then
lead to further installment of pointers, allowing nodes to take informed
decisions of redirecting requests to nodes that hold a replica of a requested
file. These pointers are placed in a limited-size cache and are replaced
following a simple least-recently used policy (i.e., cached pointers referring
to files that are never asked for, will be removed quickly).
11.6.4. File Replication in
Grid Systems
As our last subject
concerning replication of files, let us consider what happens in Grid
computing. Naturally, performance plays a crucial role in this area as many
Grid applications are highly compute-intensive. In addition, we see that
applications often also need to process vast amounts of data. As a result, much
effort has been put into replicating files to where applications are being
executed. The means to do so, however, are (somewhat) surprisingly simple.
A key observation is that in
many Grid applications data are read only. Data are often produced from
sensors, or from other applications, but rarely updated or otherwise modified
after they are produced and stored. As a result, data replication can be
applied in abundance, and this is exactly what happens.
[Page 529]
Unfortunately, the size of
the data sets are sometimes so enormous that special measures need to be taken
to avoid that data providers (i.e., those machine storing data sets) become
overloaded due to the amount of data they need to transfer over the network. On
the other hand, because much of the data is heavily replicated, balancing the
load for retrieving copies is less of an issue.
Replication in Grid systems
mainly evolves around the problem of locating the best sources to copy data
from. This problem can be solved by special replica location services, very
similar to the location services we discussed for naming systems. One obvious
approach that has been developed for the Globus toolkit is to use a DHT-based
system such as Chord for decentralized lookup of replicas (Cai et al., 2004).
In this case, a client passes a file name to any node of the service, where it
is converted to a key and subsequently looked up. The information returned to
the client contains contact addresses for the requested files.
To keep matters simple,
located files are subsequently downloaded from various sites using an FTP-like
protocol, after which the client can register its own replicas with the
replication location service. This architecture is described in more detail in
Chervenak et al. (2005), but the approach is fairly straightforward.
11.7. Fault Tolerance
Fault tolerance in
distributed file systems is handled according to the principles we discussed in
Chap. 8. As we already mentioned, in many cases, replication is deployed to
create fault-tolerant server groups. In this section, we will therefore
concentrate on some special issues in fault tolerance for distributed file
systems.
11.7.1. Handling Byzantine
Failures
One of the problems that is
often ignored when dealing with fault tolerance is that servers may exhibit
arbitrary failures. In other words, most systems do not consider the Byzantine
failures we discussed in Chap. 8. Besides complexity, the reason for ignoring
these type of failures has to do with the strong assumptions that need to be
made regarding the execution environment. Notably, it must be assumed that
communication delays are bounded.
In practical settings, such
an assumption is not realistic. For this reason, Castro and Liskov (2002) have
devised a solution for handling Byzantine failures that can also operate in
networks such as the Internet. We discuss this protocol here, as it can (and
has been) directly applied to distributed file systems, notably an NFS-based
system. Of course, there are other applications as well. The basic idea is to
deploy active replication by constructing a collection of finite state machines
and to have the nonfaulty processes in this collection execute operations in
the same order. Assuming that at most k processes fail at once, a client sends
an operation to the entire group and accepts an answer that is returned by at
least k + 1 different processes.
[Page 530]
To achieve protection
against Byzantine failures, the server group must consist of at least 3k + 1
processes. The difficult part in achieving this protection is to ensure that
nonfaulty processes execute all operations in the same order. A simple means to
achieve this goal is to assign a coordinator that simply serializes all
operations by attaching a sequence number to each request. The problem, of
course, is that the coordinator may fail.
It is with failing
coordinators that the problems start. Very much like with virtual synchrony,
processes go through a series of views, where in each view the members agree on
the nonfaulty processes, and initiate a view change when the current master
appears to be failing. This latter can be detected if we assume that sequence
numbers are handed out one after the other, so that a gap, or a timeout for an
operation may indicate that something is wrong. Note that processes may falsely
conclude that a new view needs to be installed. However, this will not affect
the correctness of the system.
An important part of the
protocol relies on the fact that requests can be correctly ordered. To this
end, a quorum mechanism is used: whenever a process receives a request to
execute operation o with number n in view v, it sends this to all other
processes, and waits until it has received a confirmation from at least 2k
others that have seen the same request. In this way, we obtain a quorum of size
2k + 1 for the request. Such a confirmation is called a quorum certificate. In
essence, it tells us that a sufficiently large number of processes have stored
the same request and that it is thus safe to proceed.
The whole protocol consists
of five phases, shown in Fig. 11-26.
Figure 11-26. The different
phases in Byzantine fault tolerance.
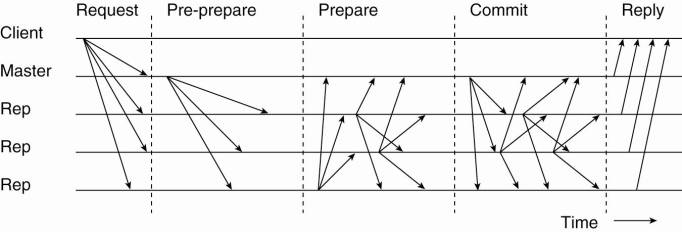
During the first phase, a
client sends a request to the entire server group. Once the master has received
the request, it multicasts a sequence number in a pre-prepare phase so that the
associated operation will be properly ordered. At that point, the slave
replicas need to ensure that the master's sequence number is accepted by a
quorum, provided that each of them accepts the master's proposal. Therefore, if
a slave accepts the proposed sequence number, it multicasts this acceptance to
the others. During the commit phase, agreement has been reached and all
processes inform each other and execute the operation, after which the client
can finally see the result.
[Page 531]
When considering the various
phases, it may seem that after the prepare phase, all processes should have
agreed on the same ordering of requests. However, this is true only within the
same view: if there was a need to change to a new view, different processes may
have the same sequence number for different operations, but which were assigned
in different views. For this reason, we need the commit phase as well, in which
each process now tells the others that it has stored the request in its local
log, and for the current view. As a consequence, even if there is a need to
recover from a crash, a process will know exactly which sequence number had
been assigned, and during which view.
Again, a committed operation
can be executed as soon as a nonfaulty process has seen the same 2k commit
messages (and they should match its own intentions). Again, we now have a
quorum of 2k + 1 for executing the operation. Of course, pending operations
with lower sequence numbers should be executed first.
Changing to a new view
essentially follows the view changes for virtual synchrony as described in
Chap. 8. In this case, a process needs to send information on the pre-prepared
messages that it knows of, as well as the received prepared messages from the
previous view. We will skip further details here.
The protocol has been implemented
for an NFS-based file system, along with various important optimizations and
carefully crafted data structures, of which the details can be found in Castro
and Liskov (2002). A description of a wrapper that will allow the incorporation
of Byzantine fault tolerance with legacy applications can be found in Castro et
al. (2003).
11.7.2. High Availability in
Peer-to-Peer Systems
An issue that has received
special attention is ensuring availability in peer-to-peer systems. On the one
hand, it would seem that by simply replicating files, availability is easy to
guarantee. The problem, however, is that the unavailability of nodes is so high
that this simple reasoning no longer holds. As we explained in Chap. 8, the key
solution to high availability is redundancy. When it comes to files, there are
essentially two different methods to realize redundancy: replication and
erasure coding.
Erasure coding is a
well-known technique by which a file is partitioned into m fragments which are
subsequently recoded into n > m fragments. The crucial issue in this coding
scheme is that any set of m encoded fragments is sufficient to reconstruct the original
file. In this case, the redundancy factor is equal to rec=n/m. Assuming an
average node availability of a, and a required file unavailability ofε, we
need to guarantee that at least m fragments are available, that is:
![]()
[Page 532]
If we compare this to
replicating files, we see that file unavailability is completely dictated by
the probability that all its rrep replicas are unavailable. If we assume that
node departures are independent and identically distributed, we have
1 - ε = 1 = (1-a)rrep
Applying some algebraic
manipulations and approximations, we can express the difference between
replication and erasure coding by considering the ratio rrep/rec in its
relation to the availability a of nodes. This relation is shown in Fig. 11-27,
for which we have set m = 5 [see also Bhagwan et al. (2004) and Rodrigues and
Liskov (2005)].
Figure 11-27. The ratio
rrep/rec as a function of node availability a.
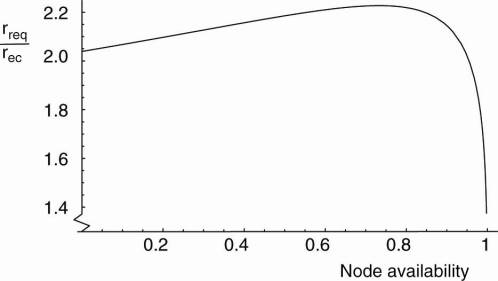
What we see from this figure
is that under all circumstances, erasure coding requires less redundancy than
simply replicating files. In other words, replicating files for increasing
availability in peer-to-peer networks in which nodes regularly come and go is
less efficient from a storage perspective than using erasure coding techniques.
One may argue that these
savings in storage are not really an issue anymore as disk capacity is often
overwhelming. However, when realizing that maintaining redundancy will impose
communication, then lower redundancy is going to save bandwidth usage. This
performance gain is notably important when the nodes correspond to user
machines connected to the Internet through asymmetric DSL or cable lines, where
outgoing links often have a capacity of only a few hundred Kbps.
11.8. Security
Many of the security
principles that we discussed in Chap. 9 are directly applied to distributed
file systems. Security in distributed file systems organized along a
client-server architecture is to have the servers handle authentication and
access control. This is a straightforward way of dealing with security, an
approach that has been adopted, for example, in systems such as NFS.
[Page 533]
In such cases, it is common
to have a separate authentication service, such as Kerberos, while the file
servers simply handle authorization. A major drawback of this scheme is that it
requires centralized administration of users, which may severely hinder
scalability. In the following, we first briefly discuss security in NFS as an
example of the traditional approach, after which we pay attention to
alternative approaches.
11.8.1. Security in NFS
As we mentioned before, the
basic idea behind NFS is that a remote file system should be presented to
clients as if it were a local file system. In this light, it should come as no
surprise that security in NFS mainly focuses on the communication between a
client and a server. Secure communication means that a secure channel between
the two should be set up as we discussed in Chap. 9.
In addition to secure RPCs,
it is necessary to control file accesses. which are handled by means of access
control file attributes in NFS. A file server is in charge of verifying the
access rights of its clients, as we will explain below. Combined with secure
RPCs, the NFS security architecture is shown in Fig. 11-28.
Figure 11-28. The NFS
security architecture.
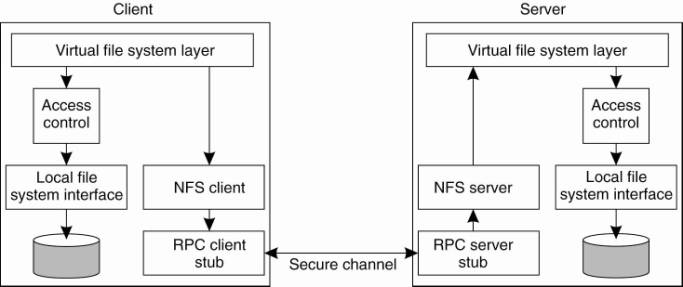
Secure RPCs
Because NFS is layered on
top of an RPC system, setting up a secure channel in NFS boils down to
establishing secure RPCs. Up until NFSv4, a secure RPC meant that only
authentication was taken care of. There were three ways for doing
authentication. We will now examine each one in turn.
[Page 534]
The most widely-used method,
one that actually hardly does any authentication, is known as system
authentication. In this UNIX-based method, a client simply passes its effective
user ID and group ID to the server, along with a list of groups it claims to be
a member of. This information is sent to the server as unsigned plaintext. In
other words, the server has no way at all of verifying whether the claimed user
and group identifiers are actually associated with the sender. In essence, the
server assumes that the client has passed a proper login procedure, and that it
can trust the client's machine.
The second authentication
method in older NFS versions uses Diffie-Hellman key exchange to establish a
session key, leading to what is called secure NFS. We explained how
Diffie-Hellman key exchange works in Chap. 9. This approach is much better than
system authentication, but is more complex, for which reason it is implemented
less frequently. Diffie-Hellman can be viewed as a public-key cryptosystem.
Initially, there was no way to securely distribute a server's public key, but
this was later corrected with the introduction of a secure name service. A
point of criticism has always been the use of relatively small public keys,
which are only 192 bits in NFS. It has been shown that breaking a
Diffie-Hellman system with such short keys is nearly trivial (Lamacchia and
Odlyzko, 1991).
The third authentication
protocol is Kerberos, which we also described in Chap. 9.
With the introduction of
NFSv4, security is enhanced by the support for RPCSEC_GSS. RPCSEC_GSS is a
general security framework that can support a myriad of security mechanism for
setting up secure channels (Eisler et al., 1997). In particular, it not only
provides the hooks for different authentication systems, but also supports
message integrity and confidentiality, two features that were not supported in
older versions of NFS.
RPCSEC_GSS is based on a
standard interface for security services, namely GSS-API, which is fully
described in Linn (1997). The RPCSEC_GSS is layered on top of this interface,
leading to the organization shown in Fig. 11-29.
Figure 11-29. Secure RPC in
NFSv4.
(This item is displayed on
page 535 in the print version)
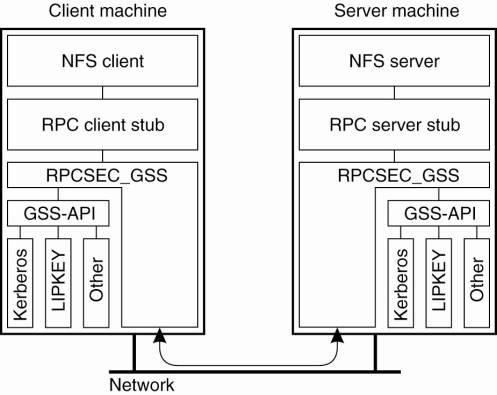
For NFSv4, RPCSEC_GSS should
be configured with support for Kerberos V5. In addition, the system must also
support a method known as LIPKEY, described in Eisler (2000). LIPKEY is a
public-key system that allows clients to be authenticated using a password
while servers can be authenticated using a public key.
The important aspect of
secure RPC in NFS is that the designers have chosen not to provide their own
security mechanisms, but only to provide a standard way for handling security.
As a consequence, proven security mechanisms, such Kerberos, can be
incorporated into an NFS implementation without affecting other parts of the
system. Also, if an existing security mechanisms turns out to be flawed (such
as in the case of Diffie-Hellman when using small keys), it can easily be
replaced.
It should be noted that
because RPCSEC_GSS is implemented as part of the RPC layer that underlies the
NFS protocols, it can also be used for older versions of NFS. However, this
adaptation to the RPC layer became available only with the introduction of NFSv4.
Access Control
Authorization in NFS is
analogous to secure RPC: it provides the mechanisms but does not specify any
particular policy. Access control is supported by means of the ACL file
attribute. This attribute is a list of access control entries, where each entry
specifies the access rights for a specific user or group. Many of the
operations that NFS distinguishes with respect to access control are relatively
straightforward and include those for reading, writing, and executing files, manipulating
file attributes, listing directories, and so on.
Noteworthy is also the
synchronize operation that essentially tells whether a process that is
colocated with a server can directly access a file, bypassing the NFS protocol
for improved performance. The NFS model for access control has much richer
semantics than most UNIX models. This difference comes from the requirements
that NFS should be able to interoperate with Windows systems. The underlying
thought is that it is much easier to fit the UNIX model of access control to
that of Windows, then the other way around.
Another aspect that makes
access control different from file systems such as in UNIX, is that access can
be specified for different users and different groups. Traditionally, access to
a file is specified for a single user (the owner of the file), a single group
of users (e.g., members of a project team), and for everyone else. NFS has many
different kinds of users and processes, as shown in Fig. 11-30.
Figure 11-30. The various
kinds of users and processes distinguished by NFS with respect to access
control.
(This item is displayed on
page 536 in the print version)
|
Type of user |
Description |
|
Owner |
The owner of a file |
|
Group |
The group of users
associated with a file |
|
Everyone |
Any user or process |
|
Interactive |
Any process accessing the
file from an interactive terminal |
|
Network |
Any process accessing the
file via the network |
|
Dialup |
Any process accessing the
file through a dialup connection to the server |
|
Batch |
Any process accessing the
file as part of batch job |
|
Anonymous |
Anyone accessing the file
without authentication |
|
Authenticated |
Any authenticated user or
process |
|
Service |
Any system-defined service
process |
[Page 536]
11.8.2. Decentralized
Authentication
One of the main problems
with systems such as NFS is that in order to properly handle authentication, it
is necessary that users are registered through a central system administration.
A solution to this problem is provided by using the Secure File Systems (SFS)
in combination with decentralized authentication servers. The basic idea,
described in full detail in Kaminsky et al. (2003) is quite simple. What other
systems lack is the possibility for a user to specify that a remote user has
certain privileges on his files. In virtually all cases, users must be globally
known to all authentication servers. A simpler approach would be to let Alice
specify that "Bob, whose details can be found at X," has certain
privileges. The authentication server that handles Alice's credentials could then
contact server X to get information on Bob.
An important problem to
solve is to have Alice's server know for sure it is dealing with Bob's
authentication server. This problem can be solved using self-certifying names,
a concept introduced in SFS (Mazières et al., 1999) aimed at separating key
management from file-system security. The overall organization of SFS is shown
in Fig. 11-31. To ensure portability across a wide range of machines, SFS has
been integrated with various NFSv3 components. On the client machine, there are
three different components, not counting the user's program. The NFS client is
used as an interface to user programs, and exchanges information with an SFS
client. The latter appears to the NFS client as being just another NFS server.
Figure 11-31. The
organization of SFS.
(This item is displayed on
page 537 in the print version)
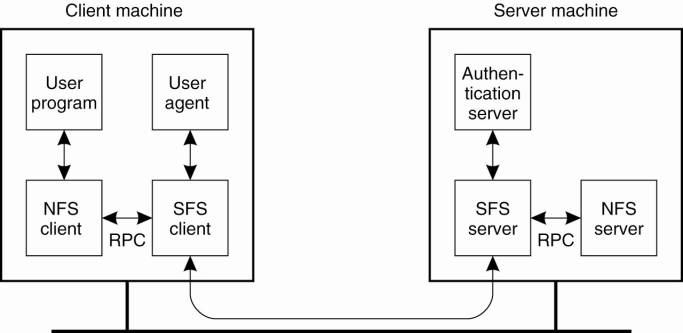
The SFS client is
responsible for setting up a secure channel with an SFS server. It is also
responsible for communicating with a locally-available SFS user agent, which is
a program that automatically handles user authentication. SFS does not
prescribe how user authentication should take place. In correspondence with its
design goals, SFS separates such matters and uses different agents for
different user-authentication protocols.
[Page 537]
On the server side there are
also three components. The NFS server is again used for portability reasons.
This server communicates with the SFS server which operates as an NFS client to
the NFS server. The SFS server forms the core process of SFS. This process is
responsible for handling file requests from SFS clients. Analogous to the SFS
agent, an SFS server communicates with a separate authentication server to
handle user authentication.
What makes SFS unique in
comparison to other distributed file systems is its organization of its name
space. SFS provides a global name space that is rooted in a directory called
/sfs. An SFS client allows its users to create symbolic links within this name
space. More importantly, SFS uses self-certifying pathnames to name its files.
Such a pathname essentially carries all the information to authenticate the SFS
server that is providing the file named by the pathname. A self-certifying
pathname consists of three parts, as shown in Fig. 11-32.
Figure 11-32. A
self-certifying pathname in SFS.

The first part of the name
consists of a location LOC, which is either a DNS domain name identifying the
SFS server, or its corresponding IP address. SFS assumes that each server S has
a public key . The second part of a self-certifying pathname is a host
identifier HID that is computed by taking a cryptographic hash H over the
server's location and its public key:
[Page 538]
HID is represented by a
32-digit number in base 32. The third part is formed by the local pathname on
the SFS server under which the file is actually stored.
Whenever a client accesses
an SFS server, it can authenticate that server by simply asking it for its
public key. Using the well-known hash function H, the client can then compute
HID and verify it against the value found in the pathname. If the two match,
the client knows it is talking to the server bearing the name as found in the
location.
How does this approach
separate key management from file system security? The problem that SFS solves
is that obtaining a server's public key can be completely separated from file
system security issues. One approach to getting the server's key is letting a
client contact the server and requesting the key as described above. However,
it is also possible to locally store a collection of keys, for example by
system administrators. In this case, there is no need to contact a server.
Instead, when resolving a pathname, the server's key is looked up locally after
which the host ID can be verified using the location part of the path name.
To simplify matters, naming
transparency can be achieved by using symbolic links. For example, assume a
client wants to access a file named
/sfs/sfs.cs.vu.nl:ag62hty4wior450hdh63u62i4f0kqere/home/steen/mbox
To hide the host ID, a user
can create a symbolic link
/sfs/vucs ![]() /sfs/sfs.cs.vu.nl:ag62hty4wior450hdh63u62i4f0kqere
/sfs/sfs.cs.vu.nl:ag62hty4wior450hdh63u62i4f0kqere
and subsequently use only
the pathname /sfs/vucs/home/steen/mbox. Resolution of that name will
automatically expand to the full SFS pathname, and using the public key found
locally, authenticate the SFS server named sfs.vu.cs.nl.
In a similar fashion, SFS
can be supported by certification authorities. Typically, such an authority
would maintain links to the SFS servers for which it is acting. As an example,
consider an SFS certification authority CA that runs the SFS server named
/sfs/sfs.certsfs.com:kty83pad72qmbna9uefdppioq7053jux
Assuming the client has
already installed a symbolic link
/certsfs ![]() /sfs/sfs.certsfs.com:kty83pad72qmbna9uefdppioq7053jux,
/sfs/sfs.certsfs.com:kty83pad72qmbna9uefdppioq7053jux,
the certification authority
could use another symbolic link
/vucs ![]() /sfs/sfs.vu.cs.nl:ag62hty4wior450hdh63u62i4f0kqere
/sfs/sfs.vu.cs.nl:ag62hty4wior450hdh63u62i4f0kqere
that points to the SFS
server sfs.vu.cs.nl. In this case, a client can simply refer to
/certsfs/vucs/home/steen/mbox knowing that it is accessing a file server whose
public key has been certified by the certification authority CA.
[Page 539]
Returning to our problem of
decentralized authentication, it should now be clear that we have all the
mechanisms in place to avoid requiring Bob to be registered at Alice's
authentication server. Instead, the latter can simply contact Bob's server
provided it is given a name. That name already contains a public key so that
Alice's server can verify the identity of Bob's server. After that, Alice's
server can accept Bob's privileges as indicated by Alice. As said, the details
of this scheme can be found in Kaminsky et al. (2003).
11.8.3. Secure Peer-to-Peer
File-Sharing Systems
So far, we have discussed
distributed file systems that were relatively easy to secure. Traditional
systems either use straightforward authentication and access control mechanisms
extended with secure communication, or we can leverage traditional
authentication to a completely decentralized scheme. However, matters become
complicated when dealing with fully decentralized systems that rely on
collaboration, such as in peer-to-peer file-sharing systems.
Secure Lookups in DHT-Based
Systems
There are various issues to
deal with (Castro et al., 2002a; and Wallach, 2002). Let us consider DHT-based
systems. In this case, we need to rely on secure lookup operations, which
essentially boil down to a need for secure routing. This means that when a
nonfaulty node looks up a key k, its request is indeed forwarded to the node
responsible for the data associated with k, or a node storing a copy of that
data. Secure routing requires that three issues are dealt with:
- Nodes are assigned identifiers in a secure way.
- Routing tables are securely maintained.
- Lookup requests are securely forwarded between
nodes.
When nodes are not securely
assigned their identifier, we may face the problem that a malicious node can assign
itself an ID so that all lookups for specific keys will be directed to itself,
or forwarded along the route that it is part of. This situation becomes more
serious when nodes can team up, effectively allowing a group to form a huge
"sink" for many lookup requests. Likewise, without secure identifier
assignment, a single node may also be able to assign itself many identifiers,
also known as a Sybil attack, creating the same effect (Douceur, 2002).
More general than the Sybil
attack is an attack by which a malicious node controls so many of a nonfaulty
node's neighbors, that it becomes virtually impossible for correct nodes to
operate properly. This phenomenon is also known as an eclipse attack, and is
analyzed in Singh et al. (2006). Defending yourself against such an attack is
difficult. One reasonable solution is to constrain the number of incoming edges
for each node. In this way, an attacker can have only a limited number of
correct nodes pointing to it. To also prevent an attacker from taking over all
incoming links to correct nodes, the number of outgoing links should also be
constrained [see also Singh et al. (2004)]. Problematic in all these cases is
that a centralized authority is needed for handing out node identifiers.
Obviously, such an authority goes against the decentralized nature of
peer-to-peer systems.
[Page 540]
When routing tables can be
filled in with alternative nodes, as is often the case when optimizing for
network proximity, an attacker can easily convince a node to point to malicious
nodes. Note that this problem does not occur when there are strong constraints
on filling routing table entries, such as in the case of Chord. The solution,
therefore, is to mix choosing alternatives with a more constrained filling of
tables [of which details are described in Castro et al. (2002a)].
Finally, to defend against
message-forwarding attacks, a node may simply forward messages along several
routes. One way to do this is to initiate a lookup from different source nodes.
Secure Collaborative Storage
However, the mere fact that
nodes are required to collaborate introduces more problems. For example,
collaboration may dictate that nodes should offer about the same amount of
storage that they use from others. Enforcing this policy can be quite tricky. One
solution is to a apply a secure trading of storage, as for Samsara, as
described in Cox and Noble (2003).
The idea is quite simple:
when a server P wants to store one of its files f on another server Q, it makes
storage available of a size equal to that of f, and reserves that space
exclusively for Q. In other words, Q now has an outstanding claim at A, as
shown in Fig. 11-33.
Figure 11-33. The principle
of storage claims in the Samsara peer-to-peer system.

To make this scheme work,
each participant reserves an amount of storage and divides that into
equal-sized chunks. Each chunk consists of incompressible data. In Samsara,
chunk ci consists of a 160-bit hash value hi computed over a secret passphrase
W concatenated with the number i. Now assume that claims are handed out in
units of 256 bytes. In that case, the first claim is computed by taking the
first 12 chunks along with the first 16 bytes of next chunk. These chunks are
concatenated and encrypted using a private key K. In general, claim Cj is computed
as
[Page 541]
Cj = K( hk,hk+1, . . .,
hk+11,hk+12[0], . . . , hk+12[15])
where k=jx13. Whenever P
wants to make use of storage at Q, Q returns a collection of claims that P is
now forced to store. Of course, Q need never store its own claims. Instead, it
can compute when needed.
The trick now is that once
in a while, Q may want to check whether P is still storing its claims. If P
cannot prove that it is doing so, Q can simply discard P's data. One blunt way
of letting P prove it still has the claims is returning copies to Q. Obviously,
this will waste a lot of bandwidth. Assume that Q had handed out claims Cj1, .
. . , Cjk to P. In that case, Q passes a 160-bit string d to P, and requests it
to compute the 160-bit hash d 1 of d concatenated with Cj1. This hash is then
to be concatenated with Cj2, producing a hash value d2, and so on. In the end,
P need only return dn to prove it still holds all the claims.
Of course, Q may also want
to replicate its files to another node, say R. In doing so, it will have to
hold claims for R. However, if Q is running out of storage, but has claimed
storage at P, it may decide to pass those claims to R instead. This principle
works as follows.
Assume that P is holding a
claim CQ for Q, and Q is supposed to hold a claim CR for R. Because there is no
restriction on what Q can store at P, Q might as well decide to store CR at P.
Then, whenever R wants to check whether Q is still holding its claim, Q will
pass a value d to Q and request it to compute the hash of d concatenated with
CR. To do so, Q simply passes d on to P, requests P to compute the hash, and
returns the result to R. If it turns out that P is no longer holding the claim,
Q will be punished by R, and Q, in turn, can punish P by removing stored data.