Chapter 13. Distributed
Coordination-Based Systems
In the previous chapters we
took a look at different approaches to distributed systems, in each chapter
focusing on a single data type as the basis for distribution. The data type,
being either an object, file, or (Web) document, has its origins in nondistributed
systems. It is adapted for distributed systems in such a way that many issues
about distribution can be made transparent to users and developers.
In this chapter we consider
a generation of distributed systems that assume that the various components of
a system are inherently distributed and that the real problem in developing
such systems lies in coordinating the activities of different components. In
other words, instead of concentrating on the transparent distribution of
components, emphasis lies on the coordination of activities between those
components.
We will see that some
aspects of coordination have already been touched upon in the previous
chapters, especially when considering event-based systems. As it turns out,
many conventional distributed systems are gradually incorporating mechanisms
that play a key role in coordination-based systems.
Before taking a look at
practical examples of systems, we give a brief introduction to the notion of
coordination in distributed systems.
13.1. Introduction to
Coordination Models
Key to the approach followed
in coordination-based systems is the clean separation between computation and
coordination. If we view a distributed system as a collection of (possibly
multithreaded) processes, then the computing part of a distributed system is
formed by the processes, each concerned with a specific computational activity,
which in principle, is carried out independently from the activities of other
processes.
[Page 590]
In this model, the
coordination part of a distributed system handles the communication and
cooperation between processes. It forms the glue that binds the activities
performed by processes into a whole (Gelernter and Carriero, 1992). In
distributed coordination-based systems, the focus is on how coordination
between the processes takes place.
Cabri et al. (2000) provide
a taxonomy of coordination models for mobile agents that can be applied equally
to many other types of distributed systems. Adapting their terminology to
distributed systems in general, we make a distinction between models along two
different dimensions, temporal and referential, as shown in Fig. 13-1.
Figure 13-1. A taxonomy of
coordination models (adapted from Cabri et al., 2000).
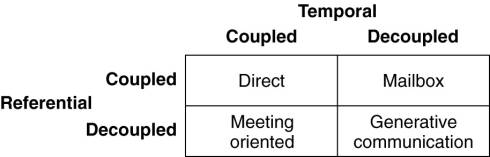
When processes are
temporally and referentially coupled, coordination takes place in a direct way,
referred to as direct coordination. The referential coupling generally appears
in the form of explicit referencing in communication. For example, a process
can communicate only if it knows the name or identifier of the other processes
it wants to exchange information with. Temporal coupling means that processes
that are communicating will both have to be up and running. This coupling is
analogous to the transient message-oriented communication we discussed in Chap.
4.
A different type of
coordination occurs when processes are temporally decoupled, but referentially
coupled, which we refer to as mailbox coordination. In this case, there is no
need for two communicating processes to execute at the same time in order to
let communication take place. Instead, communication takes place by putting
messages in a (possibly shared) mailbox. This situation is analogous to
persistent message-oriented communication as described in Chap. 4. It is
necessary to explicitly address the mailbox that will hold the messages that
are to be exchanged. Consequently, there is a referential coupling.
The combination of
referentially decoupled and temporally coupled systems form the group of models
for meeting-oriented coordination. In referentially decoupled systems,
processes do not know each other explicitly. In other words, when a process
wants to coordinate its activities with other processes, it cannot directly
refer to another process. Instead, there is a concept of a meeting in which
processes temporarily group together to coordinate their activities. The model
prescribes that the meeting processes are executing at the same time.
[Page 591]
Meeting-based systems are
often implemented by means of events, like the ones supported by object-based
distributed systems. In this chapter, we discuss another mechanism for
implementing meetings, namely publish/subscribe systems. In these systems, processes
can subscribe to messages containing information on specific subjects, while
other processes produce (i.e., publish) such messages. Most publish/subscribe
systems require that communicating processes are active at the same time; hence
there is a temporal coupling. However, the communicating processes may
otherwise remain anonymous.
The most widely-known
coordination model is the combination of referentially and temporally decoupled
processes, exemplified by generative communication as introduced in the Linda
programming system by Gelernter (1985). The key idea in generative
communication is that a collection of independent processes make use of a
shared persistent dataspace of tuples. Tuples are tagged data records
consisting of a number (but possibly zero) typed fields. Processes can put any
type of record into the shared dataspace (i.e., they generate communication
records). Unlike the case with blackboards, there is no need to agree in
advance on the structure of tuples. Only the tag is used to distinguish between
tuples representing different kinds of information.
An interesting feature of
these shared dataspaces is that they implement an associative search mechanism
for tuples. In other words, when a process wants to extract a tuple from the
dataspace, it essentially specifies (some of) the values of the fields it is
interested in. Any tuple that matches that specification is then removed from
the dataspace and passed to the process. If no match could be found, the
process can choose to block until there is a matching tuple. We defer the
details on this coordination model to later when discussing concrete systems.
We note that generative
communication and shared dataspaces are often also considered to be forms of
publish/subscribe systems. In what follows, we shall adopt this commonality as
well. A good overview of publish/subscribe systems (and taking a rather broad
perspective) can be found in Eugster et al. (2003). In this chapter we take the
approach that in these systems there is at least referential decoupling between
processes, but preferably also temporal decoupling.
13.2. Architectures
An important aspect of
coordination-based systems is that communication takes place by describing the
characteristics of data items that are to be exchanged. As a consequence,
naming plays a crucial role. We return to naming later in this chapter, but for
now the important issue is that in many cases, data items are not explicitly
identified by senders and receivers.
[Page 592]
13.2.1. Overall Approach
Let us first assume that
data items are described by a series of attributes. A data item is said to be
published when it is made available for other processes to read. To that end, a
subscription needs to be passed to the middleware, containing a description of
the data items that the subscriber is interested in. Such a description typically
consists of some (attribute, value) pairs, possibly combined with (attribute,
range) pairs. In the latter case, the specified attribute is expected to take
on values within a specified range. Descriptions can sometimes be given using
all kinds of predicates formulated over the attributes, very similar in nature
to SQL-like queries in the case of relational databases. We will come across
these types of descriptors later in this chapter.
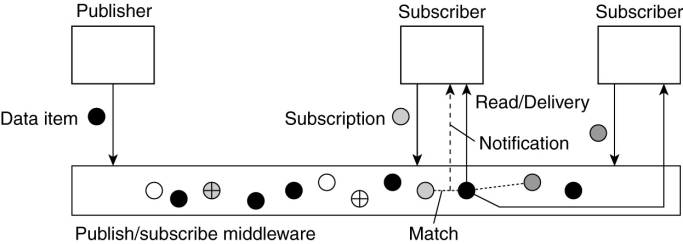
We are now confronted with a
situation in which subscriptions need to be matched against data items, as
shown in Fig. 13-2. When matching succeeds, there are two possible scenarios.
In the first case, the middleware may decide to forward the published data to
its current set of subscribers, that is, processes with a matching
subscription. As an alternative, the middleware can also forward a notification
at which point subscribers can execute a read operation to retrieve the
published data item.
Figure 13-2. The principle
of exchanging data items between publishers and subscribers.
In those cases in which data
items are immediately forwarded to subscribers, the middleware will generally
not offer storage of data. Storage is either explicitly handled by a separate
service, or is the responsibility of subscribers. In other words, we have a
referentially decoupled, but temporally coupled system.
This situation is different
when notifications are sent so that subscribers need to explicitly read the
published data. Necessarily, the middleware will have to store data items. In
these situations there are additional operations for data management. It is
also possible to attach a lease to a data item such that when the lease expires
that the data item is automatically deleted.
In the model described so
far, we have assumed that there is a fixed set of n attributes a1, . . . , an
that is used to describe data items. In particular, each published data item is
assumed to have an associated vector <(a1,v1),...,(an,vn)> of (attribute,
value) pairs. In many coordination-based systems, this assumption is false.
Instead, what happens is that events are published, which can be viewed as data
items with only a single specified attribute.
[Page 593]
Events complicate the
processing of subscriptions. To illustrate, consider a subscription such as
"notify when room R4.20 is unoccupied and the door is unlocked."
Typically, a distributed system supporting such subscriptions can be
implemented by placing independent sensors for monitoring room occupancy (e.g.,
motion sensors) and those for registering the status of a door lock. Following
the approach sketched so far, we would need to compose such primitive events
into a publishable data item to which processes can then subscribe. Event
composition turns out to be a difficult task, notably when the primitive events
are generated from sources dispersed across the distributed system.
Clearly, in
coordination-based systems such as these, the crucial issue is the efficient
and scalable implementation of matching subscriptions to data items, along with
the construction of relevant data items. From the outside, a coordination
approach provides lots of potential for building very large-scale distributed
systems due to the strong decoupling of processes. On the other hand, as we
shall see next, devising scalable implementations without losing this
independence is not a trivial exercise.
13.2.2. Traditional
Architectures
The simplest solution for
matching data items against subscriptions is to have a centralized
client-server architecture. This is a typical solution currently adopted by
many publish/subscribe systems, including IBM's WebSphere (IBM, 2005c) and
popular implementations for Sun's JMS (Sun Microsystems, 2004a). Likewise,
implementations for the more elaborate generative communication models such as
Jini (Sun Microsystems, 2005b) and JavaSpaces (Freeman et al., 1999) are mostly
based on central servers. Let us take a look at two typical examples.
Example: Jini and JavaSpaces
Jini is a distributed system
that consists of a mixture of different but related elements. It is strongly
related to the Java programming language, although many of its principles can
be implemented equally well in other languages. An important part of the system
is formed by a coordination model for generative communication. Jini provides temporal
and referential decoupling of processes through a coordination system called
JavaSpaces (Freeman et al., 1999), derived from Linda. A JavaSpace is a shared
dataspace that stores tuples representing a typed set of references to Java
objects. Multiple JavaSpaces may coexist in a single Jini system.
Tuples are stored in
serialized form. In other words, whenever a process wants to store a tuple,
that tuple is first marshaled, implying that all its fields are marshaled as
well. As a consequence, when a tuple contains two different fields that refer
to the same object, the tuple as stored in a JavaSpace implementation will hold
two marshaled copies of that object.
[Page 594]
A tuple is put into a
JavaSpace by means of a write operation, which first marshals the tuple before
storing it. Each time the write operation is called on a tuple, another
marshaled copy of that tuple is stored in the JavaSpace, as shown in Fig. 13-3.
We will refer to each marshaled copy as a tuple instance.
Figure 13-3. The general
organization of a JavaSpace in Jini.
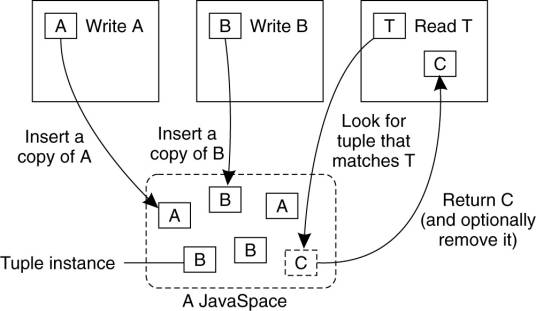
The interesting aspect of
generative communication in Jini is the way that tuple instances are read from
a JavaSpace. To read a tuple instance, a process provides another tuple that it
uses as a template for matching tuple instances as stored in a JavaSpace. Like
any other tuple, a template tuple is a typed set of object references. Only
tuple instances of the same type as the template can be read from a JavaSpace.
A field in the template tuple either contains a reference to an actual object
or contains the value NULL. For example, consider the class
class
public Tuple implements Entry {
public Integer id, value;
public Tuple(Integer id, Integer
value){this.id = id; this.value = value}
}
Then a template declared as
Tuple template =
new Tuple(null, new Integer(42))
will match the tuple
Tuple item = new
Tuple("MyName", new Integer(42))
To match a tuple instance in
a JavaSpace against a template tuple, the latter is marshaled as usual,
including its NULL fields. For each tuple instance of the same type as the
template, a field-by-field comparison is made with the template tuple. Two
fields match if they both have a copy of the same reference or if the field in
the template tuple is NULL. A tuple instance matches a template tuple if there
is a pairwise matching of their respective fields.
[Page 595]
When a tuple instance is
found that matches the template tuple provided as part of a read operation,
that tuple instance is unmarshaled and returned to the reading process. There
is also a take operation that additionally removes the tuple instance from the
JavaSpace. Both operations block the caller until a matching tuple is found. It
is possible to specify a maximum blocking time. In addition, there are variants
that simply return immediately if no matching tuple existed.
Processes that make use of
JavaSpaces need not coexist at the same time. In fact, if a JavaSpace is
implemented using persistent storage, a complete Jini system can be brought
down and later restarted without losing any tuples.
Although Jini does not
support it, it should be clear that having a central server allows
subscriptions to be fairly elaborate. For example, at the moment two nonnull
fields match if they are identical. However, realizing that each field
represents an object, matching could also be evaluated by executing an
object-specific comparison operator [see also Picco et al. (2005)]. In fact, if
such an operator can be overridden by an application, more-or-less arbitrary
comparison semantics can be implemented. It is important to note that such
comparisons may require an extensive search through currently stored data
items. Such searches cannot be easily efficiently implemented in a distributed
way. It is exactly for this reason that when elaborate matching rules are supported
we will generally see only centralized implementations.
Another advantage of having
a centralized implementation is that it becomes easier to implement
synchronization primitives. For example, the fact that a process can block
until a suitable data item is published, and then subsequently execute a
destructive read by which the matching tuple is removed, offers facilities for
process synchronization without processes needing to know each other. Again,
synchronization in decentralized systems is inherently difficult as we also
discussed in Chap. 6. We will return to synchronization below.
Example: TIB/Rendezvous
An alternative solution to
using central servers is to immediately disseminate published data items to the
appropriate subscribers using multicasting. This principle is used in
TIB/Rendezvous, of which the basic architecture is shown in Fig. 13-4 (TIBCO, 2005)
In this approach, a data item is a message tagged with a compound keyword
describing its content, such as news.comp.os.books. A subscriber provides
(parts of) a keyword, or indicating the messages it wants to receive, such as
news.comp.*.books. These keywords are said to indicate the subject of a
message.
Figure 13-4. The principle
of a publish/subscribe system as implemented in TIB/Rendezvous.
(This item is displayed on
page 596 in the print version)
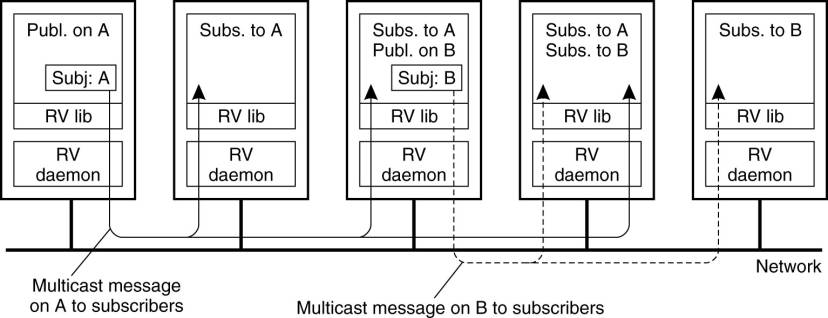
Fundamental to its
implementation is the use of broadcasting common in local-area networks,
although it also uses more efficient communication facilities when possible.
For example, if it is known exactly where a subscriber resides, point-to-point
messages will generally be used. Each host on such a network will run a
rendezvous daemon, which takes care that messages are sent and delivered
according to their subject. Whenever a message is published, it is multicast to
each host on the network running a rendezvous daemon. Typically, multicasting
is implemented using the facilities offered by the underlying network, such as
IP-multicasting or hardware broadcasting.
[Page 596]
Processes that subscribe to
a subject pass their subscription to their local daemon. The daemon constructs
a table of (process, subject), entries and whenever a message on subject S
arrives, the daemon simply checks in its table for local subscribers, and
forwards the message to each one. If there are no subscribers for S, the
message is discarded immediately.
When using multicasting as
is done in TIB/Rendezvous, there is no reason why subscriptions cannot be
elaborate and be more than string comparison as is currently the case. The
crucial observation here is that because messages are forwarded to every node
anyway, the potentially complex matching of published data against
subscriptions can be done entirely locally without further network
communication. However, as we shall discuss later, simple comparison rules are
required whenever matching across wide-area networks is needed.
13.2.3. Peer-to-Peer
Architectures
The traditional
architectures followed by most coordination-based systems suffer from
scalability problems (although their commercial vendors will state otherwise).
Obviously, having a central server for matching subscriptions to published data
cannot scale beyond a few hundred clients. Likewise, using multicasting
requires special measures to extend beyond the realm of local-area networks.
Moreover, if scalability is to be guaranteed, further restrictions on
describing subscriptions and data items may be necessary.
[Page 597]
Much research has been spent
on realizing coordination-based systems using peer-to-peer technology.
Straightforward implementations exist for those cases in which keywords are
used, as these can be hashed to unique identifiers for published data. This
approach has also been used for mapping (attribute, value) pairs to
identifiers. In these cases, matching reduces to a straightforward lookup of an
identifier, which can be efficiently implemented in a DHT-based system. This
approach works well for the more conventional publish/subscribe systems as
illustrated by Tam and Jacobsen (2003), but also for generative communication
(Busi et al., 2004).
Matters become complicated
for more elaborate matching schemes. Notoriously difficult are the cases in
which ranges need to be supported and only very few proposals exist. In the
following, we discuss one such proposal, devised by one of the authors and his
colleagues (Voulgaris et al., 2006).
Example: A Gossip-Based
Publish/Subscribe System
Consider a publish/subscribe
system in which data items can be described by means of N attributes a1, . . .
, aN whose value can be directly mapped to a floating-point number. Such values
include, for example, floats, integers, enumerations, booleans, and strings. A
subscription s takes the form of a tuple of (attribute, value/range) pairs,
such as
s = <a1 ![]() 3.0, a4
3.0, a4 ![]() [0.0, 0.5)>
[0.0, 0.5)>
In this example, s specifies
that a1 should be equal to 3.0, and a4 should lie in the interval [0.0, 0.5).
Other attributes are allowed to take on any value. For clarity, assume that
every node i enters only one subscription si.
Note that each subscription
si actually specifies a subset Si in the N-dimensional space of floating-point
numbers. Such a subset is also called a hyperspace. For the system as a whole,
only published data whose description falls in the union S = ![]() Si of
these hyperspaces is of interest. The whole idea is to automatically partition
S into M disjoint hyperspaces S1, . . . , SM such that each falls completely in
one of the subscription hyperspaces Si, and together they cover all
subscriptions. More formally, we have that:
Si of
these hyperspaces is of interest. The whole idea is to automatically partition
S into M disjoint hyperspaces S1, . . . , SM such that each falls completely in
one of the subscription hyperspaces Si, and together they cover all
subscriptions. More formally, we have that:
(Sm ![]() Si
Si ![]() Ø)
Ø) ![]() (Sm
(Sm ![]() Si)
Si)
Moreover, the system keeps M
minimal in the sense that there is no partitioning with fewer parts Sm. The
whole idea is to register, for each hyperspace Sm, exactly those nodes i for
which Sm ![]() Si. In that case, when a data item is
published, the system need merely find the Sm to which that item belongs, from
which point it can forward the item to the associated nodes.
Si. In that case, when a data item is
published, the system need merely find the Sm to which that item belongs, from
which point it can forward the item to the associated nodes.
[Page 598]
To this end, nodes regularly
exchange subscriptions using an epidemic protocol. If two nodes i and j notice
that their respective subscriptions intersect, that is Sij ![]() Si
Si ![]() Sj
Sj ![]() Ø they will record this fact and keep
references to each other. If they discover a third node k with Sijk
Ø they will record this fact and keep
references to each other. If they discover a third node k with Sijk ![]() Sij
Sij ![]() Sk
Sk ![]() Ø, the three of them will connect to each
other so that a data item d from Sijk can be efficiently disseminated. Note
that if Sij - Sijk
Ø, the three of them will connect to each
other so that a data item d from Sijk can be efficiently disseminated. Note
that if Sij - Sijk ![]() Ø, nodes i and j will maintain their mutual
references, but now associate it strictly with Sij - Sijk.
Ø, nodes i and j will maintain their mutual
references, but now associate it strictly with Sij - Sijk.
In essence, what we are
seeking is a means to cluster nodes into M different groups, such that nodes i
and j belong to the same group if and only if their subscriptions Si and Sj
intersect. Moreover, nodes in the same group should be organized into an
overlay network that will allow efficient dissemination of a data item in the
hyperspace associated with that group. This situation for a single attribute is
sketched in Fig. 13-5.
Figure 13-5. Grouping nodes
for supporting range queries in a peer-to-peer publish/subscribe system.
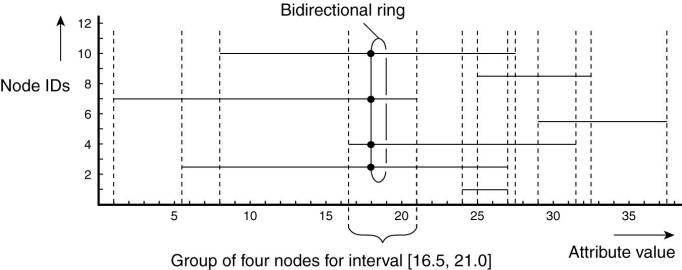
Here, we see a total of
seven nodes in which the horizontal line for node i indicates its range of
interest for the value of the single attribute. Also shown is the grouping of
nodes into disjoint ranges of interests for values of the attribute. For
example, nodes 3, 4, 7, and 10 will be grouped together representing the
interval [16.5, 21.0]. Any data item with a value in this range should be
disseminated to only these four nodes.
To construct these groups,
the nodes are organized into a gossip-based unstructured network. Each node
maintains a list of references to other neighbors (i.e., a partial view), which
it periodically exchanges with one of its neighbors as described in Chap. 2.
Such an exchange will allow a node to learn about random other nodes in the
system. Every node keeps track of the nodes it discovers with overlapping
interests (i.e., with an intersecting subscription).
At a certain moment, every
node i will generally have references to other nodes with overlapping
interests. As part of exchanging information with a node j, node i orders these
nodes by their identifiers and selects the one with the lowest identifier i1
> j, such that its subscription overlaps with that of node j, that is, Sj,i1
![]() Si1
Si1 ![]() Sj
Sj ![]() Ø.
Ø.
[Page 599]
The next one to be selected
is i2 > i1 such that its subscription also overlaps with that of j, but only
if it contains elements not yet covered by node i1. In other words, we should
have that Sj,i1,i2 ![]() (Si2 - Sj,i1 )
(Si2 - Sj,i1 ) ![]() Sj
Sj ![]() Ø. This process is repeated until all nodes
that have an overlapping interest with node i have been inspected, leading to
an ordered list i1 < i2 < . . . < in. Note that a node ik is in this
list because it covers a region R of common interest to node i and j not yet
jointly covered by nodes with a lower identifier than ik. In effect, node ik is
the first node that node j should forward a data item to that falls in this
unique region R. This procedure can be expanded to let node i construct a
bidirectional ring. Such a ring is also shown in Fig. 13-5.
Ø. This process is repeated until all nodes
that have an overlapping interest with node i have been inspected, leading to
an ordered list i1 < i2 < . . . < in. Note that a node ik is in this
list because it covers a region R of common interest to node i and j not yet
jointly covered by nodes with a lower identifier than ik. In effect, node ik is
the first node that node j should forward a data item to that falls in this
unique region R. This procedure can be expanded to let node i construct a
bidirectional ring. Such a ring is also shown in Fig. 13-5.
Whenever a data item d is
published, it is disseminated as quickly as possible to any node that is
interested in it. As it turns out, with the information available at every node
finding a node i interested in d is simple. From there on, node i need simply
forward d along the ring of subscribers for the particular range that d falls
into. To speed up dissemination, short-cuts are maintained for each ring as
well. Details can be found in Voulgaris et al. (2006).
Discussion
An approach somewhat similar
to this gossip-based solution in the sense that it attempts to find a
partitioning of the space covered by the attribute's values, but which uses a
DHT-based system is described in Gupta et al. (2004). In another proposal
described in Bharambe (2004), each attribute ai is handled by a separate
process Pi, which in turn partitions the range of its attribute across multiple
processes. When a data item d is published, it is forwarded to each Pi, where
it is subsequently stored at the process responsible for the d's value of ai.
All these approaches are
illustrative for the complexity when mapping a nontrivial publish/subscribe
system to a peer-to-peer network. In essence, this complexity comes from the
fact that supporting search in attribute-based naming systems is inherently
difficult to establish in a decentralized fashion. We will again come across
these difficulties when discussing replication.
13.2.4. Mobility and
Coordination
A topic that has received
considerable attention in the literature is how to combine publish/subscribe
solutions with node mobility. In many cases, it is assumed that there is a
fixed basic infrastructure with access points for mobile nodes. Under these
assumptions, the issue becomes how to ensure that published messages are not
delivered more than once to a subscriber who switches access points. One
practical solution to this problem is to let subscribers keep track of the
messages they have already received and simply discard duplicates. Alternative,
but more intricate solutions comprise routers that keep track of which messages
have been sent to which subscribers (see, e.g., Caporuscio et al., 2003).
[Page 600]
Example: Lime
In the case of generative
communication, several solutions have been proposed to operate a shared dataspace
in which (some of) the nodes are mobile. A canonical example in this case is
Lime (Murphy et al., 2001), which strongly resembles the JavaSpace model we
discussed previously.
In Lime, each process has
its own associated dataspace, but when processes are in each other's proximity
such that they are connected, their dataspaces become shared. Theoretically,
being connected can mean that there is a route in a joint underlying network
that allows two processes to exchange data. In practice, however, it either
means that two processes are temporarily located on the same physical host, or
their respective hosts can communicate with each other through a (single hop)
wireless link. Formally, the processes should be member of the same group and
use the same group communication protocol.
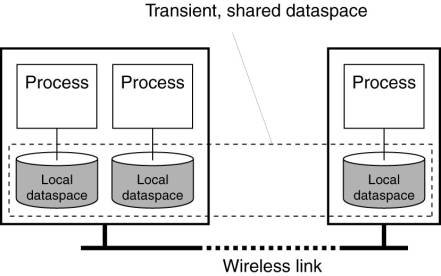
The local dataspaces of
connected processes form a transiently shared dataspace that will allow
processes to exchange tuples, as shown in Fig. 13-6. For example, when a
process P executes a write operation, the associated tuple is stored in the
process's local dataspace. In principle, it stays there until there is a
matching take operation, possibly from another process that is now in the same
group as P. In this way, the fact that we are actually dealing with a
completely distributed shared dataspace is transparent for participating
processes. However, Lime also allows breaking this transparency by specifying
exactly for whom a tuple is intended. Likewise, read and take operations can
have an additional parameter specifying from which process a tuple is expected.
Figure 13-6. Transient
sharing of local dataspaces in Lime.
To better control how tuples
are distributed, dataspaces can carry out what are known as reactions. A
reaction specifies an action to be executed when a tuple matching a given
template is found in the local dataspace. Each time a dataspace changes, an
executable reaction is selected at random, often leading to a further
modification of the dataspace. Reactions span the current shared dataspace, but
there are several restrictions to ensure that they can be executed efficiently.
For example, in the case of weak reactions, it is only guaranteed that the
associated actions are eventually executed, provided the matching data is still
accessible.
[Page 601]
The idea of reactions has
been taken a step further in TOTA, where each tuple has an associated code
fragment telling exactly how that tuple should be moved between dataspaces,
possibly also including transformations (Mamei and Zambonelli, 2004).
13.3. Processes
There is nothing really
special about the processes used in publish/subscribe systems. In most cases,
efficient mechanisms need to be deployed for searching in a potentially large
collection of data. The main problem is devising schemes that work well in
distributed environments. We return to this issue below when discussing
consistency and replication.
13.4. Communication
Communication in many
publish/subscribe systems is relatively simple. For example, in virtually every
Java-based system, all communication proceeds through remote method
invocations. One important problem that needs to be handled when
publish/subscribe systems are spread across a wide-area system is that
published data should reach only the relevant subscribers. As we described
above, using a self-organizing method by which nodes in a peer-to-peer system
are automatically clustered, after which dissemination takes place per cluster
is one solution. An alternative solution is to deploy content-based routing.
13.4.1. Content-Based
Routing
In content-based routing,
the system is assumed to be built on top of a point-to-point network in which
messages are explicitly routed between nodes. Crucial in this setup is that
routers can take routing decisions by considering the content of a message.
More precisely, it is assumed that each message carries a description of its
content, and that this description can be used to cut-off routes for which it
is known that they do not lead to receivers interested in that message.
A practical approach toward
content-based routing is proposed in Carzaniga et al. (2004). Consider a
publish/subscribe system consisting of N servers to which clients (i.e.,
applications) can send messages, or from which they can read incoming messages.
We assume that in order to read messages, an application will have previously
provided the server with a description of the kind of data it is interested in.
The server, in turn, will notify the application when relevant data has
arrived.
[Page 602]
Carzaniga et al. propose a
two-layered routing scheme in which the lowest layer consists of a shared
broadcast tree connecting the N servers. There are various ways for setting up
such a tree, ranging from network-level multicast support to application-level
multicast trees as we discussed in Chap. 4. Here, we also assume that such a
tree has been set up with the N servers as end nodes, along with a collection
of intermediate nodes forming the routers. Note that the distinction between a
server and a router is only a logical one: a single machine may host both kinds
of processes.
Consider first two extremes
for content-based routing, assuming we need to support only simple
subject-based publish/subscribe in which each message is tagged with a unique
(noncompound) keyword. One extreme solution is to send each published message
to every server, and subsequently let the server check whether any of its
clients had subscribed to the subject of that message. In essence, this is the
approach followed in TIB/Rendezvous.
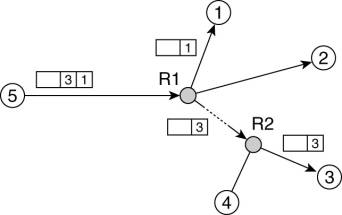
The other extreme solution
is to let every server broadcast its subscriptions to all other servers. As a
result, every server will be able to compile a list of (subject, destination)
pairs. Then, whenever an application submits a message on subject s, its
associated server prepends the destination servers to that message. When the
message reaches a router, the latter can use the list to decide on the paths
that the message should follow, as shown in Fig. 13-7.
Figure 13-7. Naive
content-based routing.
Taking this last approach as
our starting point, we can refine the capabilities of routers for deciding
where to forward messages to. To that end, each server broadcasts its
subscription across the network so that routers can compose routing filters.
For example, assume that node 3 in Fig. 13-7 subscribes to messages for which
an attribute a lies in the range [0,3], but that node 4 wants messages with a
ε [2,5]. In this case, router R2 will create a routing filter as a table
with an entry for each of its outgoing links (in this case three: one to node
3, one to node 4, and one toward router R1 ), as shown in Fig. 13-8.
[Page 603]
Figure 13-8. A partially
filled routing table.
|
Interface |
Filter |
|
To node 3 |
a ε [0,3] |
|
To node 4 |
a ε [2,5] |
|
Toward router R1 |
(unspecified) |
More interesting is what
happens at router R1. In this example, the subscriptions from nodes 3 and 4
dictate that any message with a lying in the interval [0,3] ![]() [2,5] = [0,5] should be forwarded along the
path to router R2, and this is precisely the information that R1 will store in
its table. It is not difficult to imagine that more intricate subscription
compositions can be supported.
[2,5] = [0,5] should be forwarded along the
path to router R2, and this is precisely the information that R1 will store in
its table. It is not difficult to imagine that more intricate subscription
compositions can be supported.
This simple example also
illustrates that whenever a node leaves the system, or when it is no longer
interested in specific messages, it should cancel its subscription and
essentially broadcast this information to all routers. This cancellation, in
turn, may lead to adjusting various routing filters. Late adjustments will at
worst lead to unnecessary traffic as messages may be forwarded along paths for
which there are no longer subscribers. Nevertheless, timely adjustments are
needed to keep performance at an acceptable level.
One of the problems with
content-based routing is that although the principle of composing routing
filters is simple, identifying the links along which an incoming message must
be forwarded can be compute-intensive. The computational complexity comes from
the implementation of matching attribute values to subscriptions, which
essentially boils down to an entry-by-entry comparison. How this comparison can
be done efficiently is described in Carzaniga et al. (2003).
13.4.2. Supporting Composite
Subscriptions
The examples so far form
relatively simple extensions to routing tables. These extensions suffice when
subscriptions take the form of vectors of (attribute, value/range) pairs.
However, there is often a need for more sophisticated expressions of subscriptions.
For example, it may be convenient to express compositions of subscriptions in
which a process specifies in a single subscription that it is interested in
very different types of data items. To illustrate, a process may want to see
data items on stocks from IBM and data on their revenues, but sending data
items of only one kind is not useful.
To handle subscription
compositions, Li and Jacobsen (2005) proposed to design routers analogous to
rule databases. In effect, subscriptions are transformed into rules stating
under which conditions published data should be forwarded, and along which
outgoing links. It is not difficult to imagine that this may lead to
content-based routing schemes that are far more advanced than the routing
filters described above. Supporting subscription composition is strongly
related to naming issues in coordination-based systems, which we discuss next.
13.5. Naming
Let us now pay some more
attention to naming in coordination-based systems. So far, we have mostly
assumed that every published data item has an associated vector of n
(attribute, value) pairs and that processes can subscribe to data items by
specifying predicates over these attribute values. In general, this naming
scheme can be readily applied, although systems differ with respect to
attribute types, values, and the predicates that can be used.
For example, with JavaSpaces
we saw that essentially only comparison for equality is supported, although
this can be relatively easily extended in application-specific ways. Likewise,
many commercial publish/subscribe systems support only rather primitive
string-comparison operators.
One of the problems we
already mentioned is that in many cases we cannot simply assume that every data
item is tagged with values for all attributes. In particular, we will see that
a data item has only one associated (attribute, value) pair, in which case it
is also referred to as an event. Support for subscribing to events, and notably
composite events largely dictates the discussion on naming issues in
publish/subscribe systems. What we have discussed so far should be considered
as the more primitive means for supporting coordination in distributed systems.
We now address in more depth events and event composition.
When dealing with composite
events, we need to take two different issues into account. The first one is to
describe compositions. Such descriptions form the basis for subscriptions. The
second issue is how to collect (primitive) events and subsequently match them
to subscriptions. Pietzuch et al. (2003) have proposed a general framework for
event composition in distributed systems. We take this framework as the basis
for our discussion.
13.5.1. Describing Composite
Events
Let us first consider some
examples of composite events to give a better idea of the complexity that we
may need to deal with. Fig. 13-9 shows examples of increasingly complex
composite events. In this example, R4.20 could be an air-conditioned and secured
computer room.
Figure 13-9. Examples of
events in a distributed system.
(This item is displayed on
page 605 in the print version)
|
Ex. |
Description |
|
S1 |
Notify when room R4.20 is
unoccupied |
|
S2 |
Notify when R4.20 is
unoccupied and the door is unlocked |
|
S3 |
Notify when R4.20 is
unoccupied for 10 seconds while the door is unlocked |
|
S4 |
Notify when the
temperature in R4.20 rises more than 1 degree per 30 minutes |
|
S5 |
Notify when the average
temperature in R4.20 is more than 20 degrees in the past 30 minutes |
The first two subscriptions
are relatively easy. S1 is an example that can be handled by a primitive
discrete event, whereas S2 is a simple composition of two discrete events.
Subscription S3 is more complex as it requires that the system can also report
time-related events. Matters are further complicated if subscriptions involve
aggregated values required for computing gradients (S4) or averages (S5). Note
that in the case of S5 we are requiring a continuous monitoring of the system
in order to send notifications on time.
[Page 605]
The basic idea behind an
event-composition language for distributed systems is to enable the formulation
of subscriptions in terms of primitive events. In their framework, Pietzuch et
al. provide a relatively simple language for an extended type of finite-state
machine (FSM). The extensions allow for the specification of sojourn times in
states, as well as the generation of new (composite) events. The precise
details of their language are not important for our discussion here. What is important
is that subscriptions can be translated into FSMs.
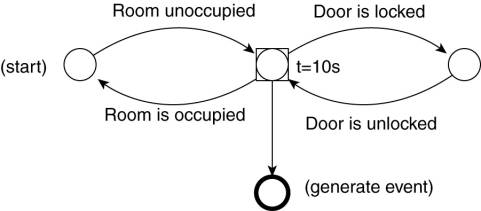
To give an example, Fig.
13-10 shows the FSM for subscription S3 from Fig. 13-9. The special case is
given by the timed state, indicated by the label "t = 10s" which
specifies that a transition to the final state is made if the door is not
locked within 10 seconds.
Figure 13-10. The finite
state machine for subscription S3 from Fig. 13-9.
Much more complex
subscriptions can be described. An important aspect is that these FSMs can
often be decomposed into smaller FSMs that communicate by passing events to
each other. Note that such an event communication would normally trigger a
state transition at the FSM for which that event is intended. For example,
assume that we want to automatically turn off the lights in room R4.20 after 2
seconds when we are certain that nobody is there anymore (and the door is
locked). In that case, we can reuse the FSM from Fig. 13-10 if we let it
generate an event for a second FSM that will trigger the lighting, as shown in
Fig. 13-11
[Page 606]
Figure 13-11. Two coupled
FSMs.
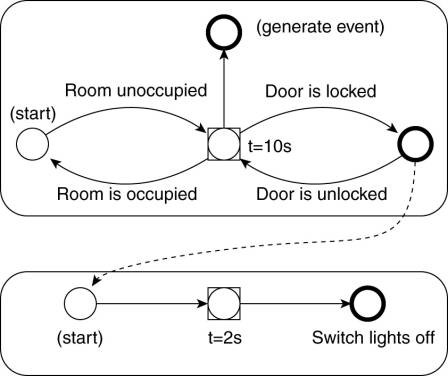
The important observation
here is that these two FSMs can be implemented as separate processes in the
distributed system. In this case, the FSM for controlling the lighting will
subscribe to the composed event that is triggered when R4.20 is unoccupied and
the door is locked. This leads to distributed detectors which we discuss next.
13.5.2. Matching Events and
Subscriptions
Now consider a
publish/subscribe system supporting composite events. Every subscription is
provided in the form of an expression that can be translated into a finite
state machine (FSM). State transitions are essentially triggered by primitive
events that take place, such as leaving a room or locking a door.
To match events and
subscriptions, we can follow a simple, naive implementation in which every
subscriber runs a process implementing the finite state machine associated with
its subscription. In that case, all the primitive events that are relevant for
a specific subscription will have to be forwarded to the subscriber. Obviously,
this will generally not be very efficient.
A much better approach is to
consider the complete collection of subscriptions, and decompose subscriptions
into communicating finite state machines, such that some of these FSMs are
shared between different subscriptions. An example of this sharing was shown in
Fig. 13-11. This approach toward handling subscriptions leads to what are known
as distributed event detectors. Note that a distribution of event detectors is
similar in nature to the distributed resolution of names in various naming
systems. Primitive events lead to state transitions in relatively simple finite
state machines, in turn triggering the generation of composite events. The
latter can then lead to state transitions in other FSMs, again possibly leading
to further event generation. Of course, events translate to messages that are
sent over the network to processes that subscribed to them.
[Page 607]
Besides optimizing through
sharing, breaking down subscriptions into communicating FSMs also has the
potential advantage of optimizing network usage. Consider again the events
related to monitoring the computer room we described above. Assuming that there
only processes interested in the composite events, it makes sense to compose
these events close to the computer room. Such a placement will prevent having
to send the primitive events across the network. Moreover, when considering
Fig. 13-9, we see that we may only need to send the alarm when noticing that
the room is unoccupied for 10 seconds while the door is unlocked. Such an event
will generally occur rarely in comparison to, for example, (un)locking the
door.
Decomposing subscriptions
into distributed event detectors, and subsequently optimally placing them
across a distributed system is still subject to much research. For example, the
last word on subscription languages has not been said, and especially the
trade-off between expressiveness and efficiency of implementations will attract
a lot of attention. In most cases, the more expressive a language is, the more
unlikely there will be an efficient distributed implementation. Current
proposals such as by Demers et al. (2006) and by Liu and Jacobsen (2004)
confirm this. It will take some years before we see these techniques being
applied to commercial publish/subscribe systems.
13.6. Synchronization
Synchronization in
coordination-based systems is generally restricted to systems supporting
generative communication. Matters are relatively straightforward when only a
single server is used. In that case, processes can be simply blocked until
tuples become available, but it is also simpler to remove them. Matters become
complicated when the shared dataspace is replicated and distributed across
multiple servers, as we describe next.
13.7. Consistency and
Replication
Replication plays a key role
in the scalability of coordination-based systems, and notably those for
generative communication. In the following, we first consider some standard
approaches as have been explored in a number of systems such as JavaSpaces.
Next, we describe some recent results that allow for the dynamic and automatic
placement of tuples depending on their access patterns.
[Page 608]
13.7.1. Static Approaches
The distributed
implementation of a system supporting generative communication frequently
requires special attention. We concentrate on possible distributed
implementations of a JavaSpace server, that is, an implementation by which the
collection of tuple instances may be distributed and replicated across several
machines. An overview of implementation techniques for tuple-based runtime
systems is given by Rowstron (2001).
- General Considerations
- An efficient distributed implementation of a
JavaSpace has to solve two problems:
- How to simulate associative addressing without
massive searching.
- How to distribute tuple instances among machines
and locate them later.
The key to both problems is
to observe that each tuple is a typed data structure. Splitting the tuple space
into subspaces, each of whose tuples is of the same type simplifies programming
and makes certain optimizations possible. For example, because tuples are
typed, it becomes possible to determine at compile time which subspace a call
to a write, read, or take operates on. This partitioning means that only a
fraction of the set of tuple instances has to be searched.
In addition, each subspace
can be organized as a hash table using (part of) its i-th tuple field as the
hash key. Recall that every field in a tuple instance is a marshaled reference
to an object. JavaSpaces does not prescribe how marshaling should be done.
Therefore, an implementation may decide to marshal a reference in such a way
that the first few bytes are used as an identifier of the type of the object
that is being marshaled. A call to a write, read, or take operation can then be
executed by computing the hash function of the ith field to find the position
in the table where the tuple instance belongs. Knowing the subspace and table
position eliminates all searching. Of course, if the ith field of a read or
take operation is NULL, hashing is not possible, so a complete search of the
subspace is generally needed. By carefully choosing the field to hash on,
however, searching can often be avoided.
Additional optimizations are
also used. For example, the hashing scheme described above distributes the
tuples of a given subspace into bins to restrict searching to a single bin. It
is possible to place different bins on different machines, both to spread the
load more widely and to take advantage of locality. If the hashing function is
the type identifier modulo the number of machines, the number of bins scales
linearly with the system size [see also Bjornson (1993)].
[Page 609]
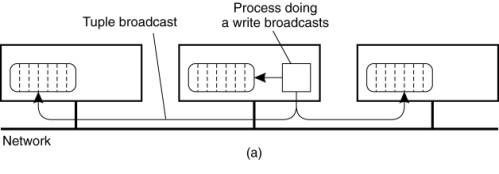
On a network of computers,
the best choice depends on the communication architecture. If reliable
broadcasting is available, a serious candidate is to replicate all the
subspaces in full on all machines, as shown in Fig. 13-12. When a write is
done, the new tuple instance is broadcast and entered into the appropriate
subspace on each machine. To do a read or take operation, the local subspace is
searched. However, since successful completion of a take requires removing the
tuple instance from the JavaSpace, a delete protocol is required to remove it
from all machines. To prevent race conditions and deadlocks, a two-phase commit
protocol can be used.
Figure 13-12. A JavaSpace
can be replicated on all machines. The dotted lines show the partitioning of
the JavaSpace into subspaces. (a) Tuples are broadcast on write. (b) reads are
local, but the removing an instance when calling take must be broadcast.
This design is
straightforward, but may not scale well as the system grows in the number of
tuple instances and the size of the network. For example, implementing this
scheme across a wide-area network is prohibitively expensive.
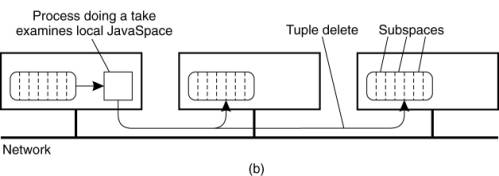
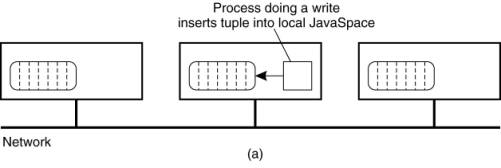
The inverse design is to do
writes locally, storing the tuple instance only on the machine that generated
it, as shown in Fig. 13-13. To do a read or take, a process must broadcast the
template tuple. Each recipient then checks to see if it has a match, sending
back a reply if it does.
Figure 13-13. Nonreplicated
JavaSpace. (a) A write is done locally. (b) A read or take requires the
template tuple to be broadcast in order to find a tuple instance.
(This item is displayed on
page 610 in the print version)
If the tuple instance is not
present, or if the broadcast is not received at the machine holding the tuple,
the requesting machine retransmits the broadcast request ad infinitum,
increasing the interval between broadcasts until a suitable tuple instance
materializes and the request can be satisfied. If two or more tuple instances
are sent, they are treated like local writes and the instances are effectively
moved from the machines that had them to the one doing the request. In fact,
the runtime system can even move tuples around on its own to balance the load.
Carriero and Gelernter (1986) used this method for implementing the Linda tuple
space on a LAN.
[Page 610]
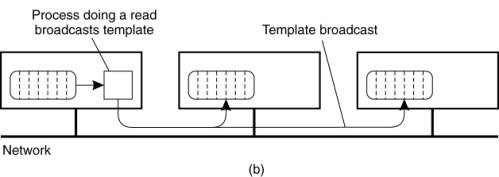
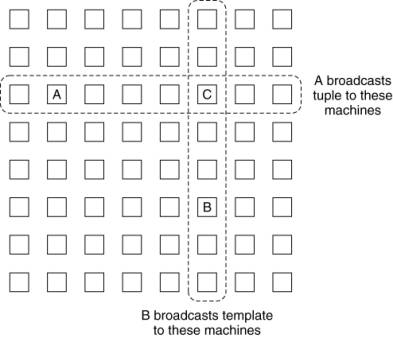
These two methods can be
combined to produce a system with partial replication. As a simple example,
imagine that all the machines logically form a rectangular grid, as shown in
Fig. 13-14. When a process on a machine A wants to do a write, it broadcasts (or
sends by point-to-point message) the tuple to all machines in its row of the
grid. When a process on a machine B wants to read or take a tuple instance, it
broadcasts the template tuple to all machines in its column. Due to the
geometry, there will always be exactly one machine that sees both the tuple
instance and the template tuple (C in this example), and that machine makes the
match and sends the tuple instance to the process requesting for it. This
approach is similar to using quorum-based replication as we discussed in Chap.
7.
Figure 13-14. Partial
broadcasting of tuples and template tuples.
(This item is displayed on
page 611 in the print version)
The implementations we have
discussed so far have serious scalability problems caused by the fact that
multicasting is needed either to insert a tuple into a tuple space, or to
remove one. Wide-area implementations of tuple spaces do not exist. At best,
several different tuple spaces can coexist in a single system, where each tuple
space itself is implemented on a single server or on a local-area network. This
approach is used, for example, in PageSpaces (Ciancarini et al., 1998) and WCL
(Rowstron and Wray, 1998). In WCL, each tuple-space server is responsible for
an entire tuple space. In other words, a process will always be directed to
exactly one server. However, it is possible to migrate a tuple space to a
different server to enhance performance. How to develop an efficient wide-area
implementation of tuple spaces is still an open question.
[Page 611]
13.7.2. Dynamic Replication
Replication in
coordination-based systems has generally been restricted to static policies for
parallel applications like those discussed above. In commercial applications,
we also see relatively simple schemes in which entire dataspaces or otherwise
statically predefined parts of a data set are subject to a single policy
(GigaSpaces, 2005). Inspired by the fine-grained replication of Web documents
in Globule, performance improvements can also be achieved when differentiating
replication between the different kinds of data stored in a dataspace. This
differentiation is supported by GSpace, which we briefly discuss in this
section.
GSpace Overview
GSpace is a distributed
coordination-based system that is built on top of Java-Spaces (Russello et al.,
2004, 2006). Distribution and replication of tuples in GSpace is done for two
different reasons: improving performance and availability. A key element in
this approach is the separation of concerns: tuples that need to be replicated
for availability may need to follow a different strategy than those for which
performance is at stake. For this reason, the architecture of GSpace has been
set up to support a variety of replication policies, and such that different
tuples may follow different policies.
[Page 612]
Figure 13-15. Internal
organization of a GSpace kernel.
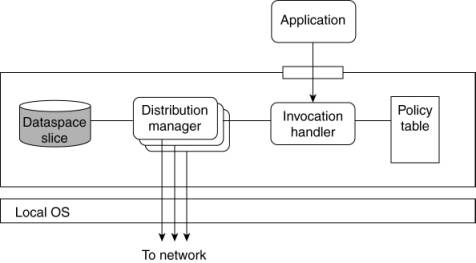
The principal working is
relatively simple. Every application is offered an interface with a read,
write, and take interface, similar to what is offered by Java-Spaces. However,
every call is picked up by a local invocation handler which looks up the policy
that should be followed for the specific call. A policy is selected based on
the type and content of the tuple/template that is passed as part of the call.
Every policy is identified by a template, similar to the way that templates are
used to select tuples in other Java-based shared dataspaces as we discussed
previously.
The result of this selection
is a reference to a distribution manager, which implements the same interface,
but now does it according to a specific replication policy. For example, if a
master/slave policy has been implemented, a read operation may be implemented
by immediately reading a tuple from the locally available dataspace. Likewise,
a write operation may require that the distribution manager forwards the update
to the master node and awaits an acknowledgment before performing the operation
locally.
Finally, every GSpace kernel
has a local dataspace, called a slice, which is implemented as a full-fledged,
nondistributed version of JavaSpaces.
In this architecture (of
which some components are not shown for clarity), policy descriptors can be
added at runtime, and likewise, distribution managers can be changed as well.
This setup allows for a fine-grained tuning of the distribution and replication
of tuples, and as is shown in Russello et al. (2004), such fine-tuning allows
for much higher performance than is achievable with any fixed, global strategy
that is applied to all tuples in a dataspace.
[Page 613]
Adaptive Replication
However, the most important
aspect with systems such as GSpace is that replication management is automated.
In other words, rather than letting the application developer figure out which
combination of policies is the best, it is better to let the system monitor
access patterns and behavior and subsequently adopt policies as necessary.
To this end, GSpace follows
the same approach as in Globule: it continuously measures consumed network
bandwidth, latency, and memory usage and depending on which of these metrics is
considered most important, places tuples on different nodes and chooses the
most appropriate way to keep replicas consistent. The evaluation of which
policy is the best for a given tuple is done by means of a central coordinator
which simply collects traces from the nodes that constitute the GSpace system.
An interesting aspect is
that from time to time we may need to switch from one replication policy to
another. There are several ways in which such a transition can take place. As
GSpace aims to separate mechanisms from policies as best as possible, it can
also handle different transition policies. The default case is to temporarily
freeze all operations for a specific type of tuple, remove all replicas and
reinsert the tuple into the shared dataspace but now following the newly
selected replication policy. However, depending on the new replication policy,
a different way of making the transition may be possible (and cheaper). For
example, when switching from no replication to master/slave replication, one
approach could be to lazily copy tuples to the slaves when they are first
accessed.
13.8. Fault Tolerance
When considering that fault
tolerance is fundamental to any distributed system, it is somewhat surprising
how relatively little attention has been paid to fault tolerance in
coordination-based systems, including basic publish/subscribe systems as well
as those supporting generative communication. In most cases, attention focuses
on ensuring efficient reliability of data delivery, which essentially boils
down to guaranteeing reliable communication. When the middleware is also expected
to store data items, as is the case with generative communication, some effort
is paid to reliable storage. Let us take a closer look at these two cases.
13.8.1. Reliable
Publish-Subscribe Communication
In coordination-based
systems where published data items are matched only against live subscribers,
reliable communication plays a crucial role. In this case, fault tolerance is
most often implemented through the implementation of reliable multicast systems
that underly the actual publish/subscribe software. There are several issues
that are generally taken care of. First, independent of the way that
content-based routing takes place, a reliable multicast channel is set up.
Second, process fault tolerance needs to be handled. Let us take a look how
these matters are addressed in TIB/Rendezvous.
[Page 614]
Example: Fault Tolerance in
TIB/Rendezvous
TIB/Rendezvous assumes that
the communication facilities of the underlying network are inherently
unreliable. To compensate for this unreliability, whenever a rendezvous daemon
publishes a message to other daemons, it will keep that message for at least 60
seconds. When publishing a message, a daemon attaches a (subject independent)
sequence number to that message. A receiving daemon can detect it is missing a
message by looking at sequence numbers (recall that messages are delivered to
all daemons). When a message has been missed, the publishing daemon is
requested to retransmit the message.
This form of reliable communication
cannot prevent that messages may still be lost. For example, if a receiving
daemon requests a retransmission of a message that has been published more than
60 seconds ago, the publishing daemon will generally not be able to help
recover this lost message. Under normal circumstances, the publishing and
subscribing applications will be notified that a communication error has
occurred. Error handling is then left to the applications to deal with.
Much of the reliability of
communication in TIB/Rendezvous is based on the reliability offered by the
underlying network. TIB/Rendezvous also provides reliable multicasting using
(unreliable) IP multicasting as its underlying communication means. The scheme
followed in TIB/Rendezvous is a transport-level multicast protocol known as
Pragmatic General Multicast (PGM), which is described in Speakman et al.
(2001). We will discuss PGM briefly.
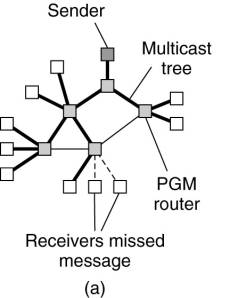
PGM does not provide hard
guarantees that when a message is multicast it will eventually be delivered to
each receiver. Fig. 13-16(a) shows a situation in which a message has been
multicast along a tree, but it has not been delivered to two receivers. PGM
relies on receivers detecting that they have missed messages for which they
will send a retransmission request (i.e., a NAK) to the sender. This request is
sent along the reverse path in the multicast tree rooted at the sender, as
shown in Fig. 13-16(b). Whenever a retransmission request reaches an
intermediate node, that node may possibly have cached the requested message, at
which point it will handle the retransmission. Otherwise, the node simply
forwards the NAK to the next node toward the sender. The sender is ultimately
responsible for retransmitting a message.
Figure 13-16. The principle
of PGM. (a) A message is sent along a multicast tree. (b) A router will pass
only a single NAK for each message. (c) A message is retransmitted only to
receivers that have asked for it.
(This item is displayed on
page 615 in the print version)
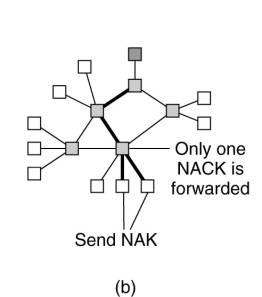
PGM takes several measures
to provide a scalable solution to reliable multicasting. First, if an
intermediate node receives several retransmission requests for exactly the same
message, only one retransmission request is forwarded toward the sender. In
this way, an attempt is made to ensure that only a single NAK reaches the
sender, so that a feedback implosion is avoided. We already came across this
problem in Chap. 8 when discussing scalability issues in reliable multicasting.
[Page 615]
A second measure taken by
PGM is to remember the path through which a NAK traverses from receivers to the
sender, as is shown in Fig. 13-16(c). When the sender finally retransmits the
requested message, PGM takes care that the message is multicast only to those
receivers that had requested retransmission. Consequently, receivers to which
the message had been successfully delivered are not bothered by retransmissions
for which they have no use.
Besides the basic
reliability scheme and reliable multicasting through PGM, TIB/Rendezvous
provides further reliability by means of certified message delivery. In this
case, a process uses a special communication channel for sending or receiving
messages. The channel has an associated facility, called a ledger, for keeping
track of sent and received certified messages. A process that wants to receive
certified messages registers itself with the sender of such messages. In
effect, registration allows the channel to handle further reliability issues
for which the rendezvous daemons provide no support. Most of these issues are
hidden from applications and are handled by the channel's implementation.
When a ledger is implemented
as a file, it becomes possible to provide reliable message delivery even in the
presence of process failures. For example, when a receiving process crashes,
all messages it misses until it recovers again are stored in a sender's ledger.
Upon recovery, the receiver simply contacts the ledger and requests the missed
messages to be retransmitted.
To enable the masking of
process failures, TIB/Rendezvous provides a simple means to automatically
activate or deactivate processes. In this context, an active process normally
responds to all incoming messages, while an inactive one does not. An inactive
process is a running process that can handle only special events as we explain
shortly.
[Page 616]
Processes can be organized
into a group, with each process having a unique rank associated with it. The
rank of a process is determined by its (manually assigned) weight, but no two
processes in the same group may have the same rank. For each group,
TIB/Rendezvous will attempt to have a group-specific number of processes
active, called the group's active goal. In many cases, the active goal is set
to one so that all communication with a group reduces to a primary-based
protocol as discussed in Chap. 7.
An active process regularly
sends a message to all other members in the group to announce that it is still
up and running. Whenever such a heartbeat message is missing, the middleware
will automatically activate the highest-ranked process that is currently
inactive. Activation is accomplished by a callback to an action operation that
each group member is expected to implement. Likewise, when a previously crashed
process recovers again and becomes active, the lowest-ranked currently active
process will be automatically deactivated.
To keep consistent with the
active processes, special measures need to be taken by an inactive process
before it can become active. A simple approach is to let an inactive process
subscribe to the same messages as any other group member. An incoming message
is processed as usual, but no reactions are ever published. Note that this
scheme is akin to active replication.
13.8.2. Fault Tolerance in
Shared Dataspaces
When dealing with generative
communication, matters become more complicated. As also noted in Tolksdorf and Rowstron
(2000), as soon as fault tolerance needs to be incorporated in shared
dataspaces, solutions can often become so inefficient that only centralized
implementations are feasible. In such cases, traditional solutions are applied,
notably using a central server that is backed up in using a simple
primary-backup protocol, in combination with checkpointing.
An alternative is to deploy
replication more aggressively by placing copies of data items across the
various machines. This approach has been adopted in GSpace, essentially
deploying the same mechanisms it uses for improving performance through
replication. To this end, each node computes its availability, which is then
used in computing the availability of a single (replicated) data item (Russello
et al., 2006).
To compute its availability,
a node regularly writes a timestamp to persistent storage, allowing it to
compute the time when it is up, and the time when it was down. More precisely,
availability is computed in terms of the mean time to failure (MTTF) and the
mean time to repair (MTTR):
![]()
[Page 617]
To compute MTTF and MTTR, a
node simply looks at the logged timestamps, as shown in Fig. 13-17. This will
allow it to compute the averages for the time between failures, leading to an
availability of:

Figure 13-17. The time line
of a node experiencing failures.
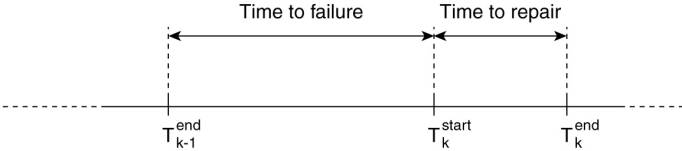
Note that it is necessary to
regularly log timestamps and that ![]() can be taken only as a best estimate of when
a crash occurred. However, the thus computed availability will be pessimistic,
as the actual time that a node crashed for the kth time will be slightly later
than
can be taken only as a best estimate of when
a crash occurred. However, the thus computed availability will be pessimistic,
as the actual time that a node crashed for the kth time will be slightly later
than ![]() . Also,
instead of taking averages since the beginning, it is also possible to take
only the last N crashes into account.
. Also,
instead of taking averages since the beginning, it is also possible to take
only the last N crashes into account.
In GSpace, each type of data
item has an associated primary node that is responsible for computing that
type's availability. Given that a data item is replicated across m nodes, its
availability is computed by considering the availability ai of each of the m
nodes leading to:

By simply taking the
availability of a data item into account, as well as those of all nodes, the
primary can compute an optimal placement for a data item that will satisfy the
availability requirements for a data item. In addition, it can also take other
factors into account, such as bandwidth usage and CPU loads. Note that
placement may change over time if these factors fluctuate.
13.9. Security
Security in
coordination-based systems poses a difficult problem. On the one hand we have
stated that processes should be referentially decoupled, but on the other hand
we should also ensure the integrity and confidentiality of data. This security
is normally implemented through secure (multicast) channels, which effectively
require that senders and receivers can authenticate each other. Such
authentication violates referential decoupling.
[Page 618]
To solve this problem there
are different approaches. One common approach is to set up a network of brokers
that handle the processing of data and subscriptions. Client processes will
then contact the brokers, who then take care of authentication and
authorization. Note that such an approach does require that the clients trust
the brokers. However, as we shall see later, by differentiating between types
of brokers, it is not necessary that a client has to trust all brokers
comprising the system.
By nature of data
coordination, authorization naturally translates to confidentiality issues. We
will now take a closer look at these issues, following the discussion as
presented in Wang et al. (2002).
13.9.1. Confidentiality
One important difference
between many distributed systems and coordination-based ones is that in order
to provide efficiency, the middleware needs to inspect the content of published
data. Without being able to do so, the middleware can essentially only flood
data to all potential subscribers. This poses the problem of information
confidentiality which refers to the fact that it is sometimes important to
disallow the middleware to inspect published data. This problem can be
circumvented through end-to-end encryption; the routing substrate only sees
source and destination addresses.
If published data items are
structured in the sense that every item contains multiple fields, it is
possible to deploy partial secrecy. For example, data regarding real estate may
need to be shipped between agents of the same office with branches at different
locations, but without revealing the exact address of the property. To allow
for content-based routing, the address field could be encrypted, while the
description of the property could be published in the clear. To this end,
Khurana and Koleva (2006) propose to use a per-field encryption scheme as
introduced in Bertino and Ferrari (2002). In this case, the agents belonging to
the same branch would share the secret key for decrypting the address field. Of
course, this violates referential decoupling, but we will discuss a potential
solution to this problem later.
More problematic is the case
when none of the fields may be disclosed to the middleware in plaintext. The
only solution that remains is that content-based routing takes place on the
encrypted data. As routers get to see only encrypted data, possibly on a
per-field basis, subscriptions will need to be encoded in such a way that
partial matching can take place. Note that a partial match is the basis that a
router uses to decide which outgoing link a published data item should be
forwarded on.
This problem comes very
close to querying and searching through encrypted data, something clearly next
to impossible to achieve. As it turns out, maintaining a high degree of secrecy
while still offering reasonable performance is known to be very difficult
(Kantarcioglu and Clifton, 2005). One of the problems is that if per-field
encryption is used, it becomes much easier to find out what the data is all
about.
[Page 619]
Having to work on encrypted
data also brings up the issue of subscription confidentiality, which refers to
the fact that subscriptions may not be disclosed to the middleware either. In
the case of subject-based addressing schemes, one solution is to simply use
per-field encryption and apply matching on a strict field-by-field basis.
Partial matching can be accommodated in the case of compound keywords, which
can be represented as encrypted sets of their constituents. A subscriber would
then send encrypted forms of such constituents and let the routers check for
set membership, as also suggested by Raiciu and Rosenblum (2005). As it turns
out, it is even possible to support range queries, provided an efficient scheme
can be devised for representing intervals. A potential solution is discussed in
Li et al. (2004a).
Finally, publication
confidentiality is also an issue. In this case, we are touching upon the more
traditional access control mechanisms in which certain processes should not
even be allowed to see certain messages. In such cases, publishers may want to
explicitly restrict the group of possible subscribers. In many cases, this
control can be exerted out-of-band at the level of the publishing and
subscribing applications. However, it may convenient that the middleware offers
a service to handle such access control.
Decoupling Publishers from
Subscribers
If it is necessary to
protect data and subscriptions from the middleware, Khurana and Koleva (2006)
propose to make use of a special accounting service (AS), which essentially
sits between clients (publishers and subscribers) and the actual
publish/subscribe middleware. The basic idea is to decouple publishers from
subscribers while still providing information confidentiality. In their scheme,
subscribers register their interest in specific data items, which are
subsequently routed as usual. The data items are assumed to contain fields that
have been encrypted. To allow for decryption, once a message should be delivered
to a subscriber, the router passes it to the accounting service where it is
transformed into a message that only the subscriber can decrypt. This scheme is
shown in Fig. 13-18.
Figure 13-18. Decoupling
publishers from subscribers using an additional trusted service.
(This item is displayed on
page 620 in the print version)
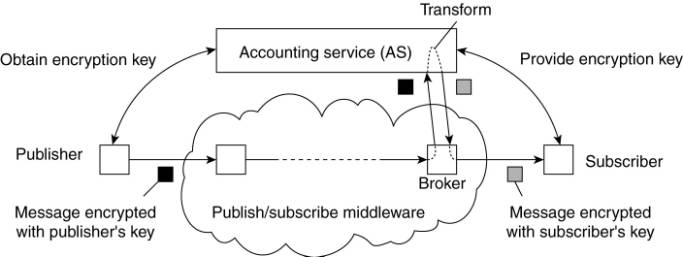
A publisher registers itself
at any node of the publish/subscribe network, that is, at a broker. The broker
forwards the registration information to the accounting service which then
generates a public key to be used by the publisher, and which is signed by the
AS. Of course, the AS keeps the associated private key to itself. When a
subscriber registers, it provides an encryption key that is forwarded by the
broker. It is necessary to go through a separate authentication phase to ensure
that only legitimate subscribers register. For example, brokers should
generally not be allowed to subscribe for published data.
[Page 620]
Ignoring many details, when
a data item is published, its critical fields will have been encrypted by the
publisher. When the data item arrives at a broker who wishes to pass it on to a
subscriber, the former requests the AS to transform the message by first
decrypting it, and then encrypt it with the key provided by the subscriber. In
this way, the brokers will never get to know about content that should be kept
secret, while at the same time, publishers and subscribers need not share key
information.
Of course, it is crucial
that accounting service itself can scale. Various measures can be taken, but
one reasonable approach is to introduce realms in a similar way that Kerberos
does. In this case, messages in transmission may need to be transformed by re-encrypting
them using the public key of a foreign accounting service. For details, we
refer the interested reader to (Khurana and Koleva, 2006).
13.9.2. Secure Shared
Dataspaces
Very little work has been
done when it comes to making shared dataspaces secure. A common approach is to
simply encrypt the fields of data items and let matching take place only when
decryption succeeds and content matches with a subscription. This approach is
described in Vitek et al. (2003). One of the major problems with this approach
is that keys may need to be shared between publishers and subscribers, or that
the decryption keys of the publishers should be known to authorized
subscribers.
Of course, if the shared
dataspace is trusted (i.e., the processes implementing the dataspace are
allowed to see the content of tuples), matters become much simpler. Considering
that most implementations make use of only a single server, extending that
server with authentication and authorization mechanisms is often the approach
followed in practice.