Chapter 3. Processes
In this chapter, we take a
closer look at how the different types of processes play a crucial role in distributed
systems. The concept of a process originates from the field of operating
systems where it is generally defined as a program in execution. From an
operating-system perspective, the management and scheduling of processes are
perhaps the most important issues to deal with. However, when it comes to
distributed systems, other issues turn out to be equally or more important.
For example, to efficiently
organize client-server systems, it is often convenient to make use of
multithreading techniques. As we discuss in the first section, a main
contribution of threads in distributed systems is that they allow clients and
servers to be constructed such that communication and local processing can
overlap, resulting in a high level of performance.
In recent years, the concept
of virtualization has gained popularity. Virtualization allows an application,
and possibly also its complete environment including the operating system, to
run concurrently with other applications, but highly independent of the
underlying hardware and platforms, leading to a high degree of portability.
Moreover, virtualization helps in isolating failures caused by errors or
security problems. It is an important concept for distributed systems, and we
pay attention to it in a separate section.
As we argued in Chap. 2,
client-server organizations are important in distributed systems. In this
chapter, we take a closer look at typical organizations of both clients and
servers. We also pay attention to general design issues for servers.
[Page 70]
An important issue,
especially in wide-area distributed systems, is moving processes between
different machines. Process migration or more specifically, code migration, can
help in achieving scalability, but can also help to dynamically configure
clients and servers. What is actually meant by code migration and what its
implications are is also discussed in this chapter.
3.1. Threads
Although processes form a
building block in distributed systems, practice indicates that the granularity
of processes as provided by the operating systems on which distributed systems
are built is not sufficient. Instead, it turns out that having a finer
granularity in the form of multiple threads of control per process makes it
much easier to build distributed applications and to attain better performance.
In this section, we take a closer look at the role of threads in distributed
systems and explain why they are so important. More on threads and how they can
be used to build applications can be found in Lewis and Berg (1998) and Stevens
(1999).
3.1.1. Introduction to Threads
To understand the role of
threads in distributed systems, it is important to understand what a process
is, and how processes and threads relate. To execute a program, an operating
system creates a number of virtual processors, each one for running a different
program. To keep track of these virtual processors, the operating system has a
process table, containing entries to store CPU register values, memory maps,
open files, accounting information, privileges, etc. A process is often defined
as a program in execution, that is, a program that is currently being executed
on one of the operating system's virtual processors. An important issue is that
the operating system takes great care to ensure that independent processes
cannot maliciously or inadvertently affect the correctness of each other's
behavior. In other words, the fact that multiple processes may be concurrently
sharing the same CPU and other hardware resources is made transparent. Usually,
the operating system requires hardware support to enforce this separation.
This concurrency
transparency comes at a relatively high price. For example, each time a process
is created, the operating system must create a complete independent address
space. Allocation can mean initializing memory segments by, for example,
zeroing a data segment, copying the associated program into a text segment, and
setting up a stack for temporary data. Likewise, switching the CPU between two
processes may be relatively expensive as well. Apart from saving the CPU
context (which consists of register values, program counter, stack pointer,
etc.), the operating system will also have to modify registers of the memory
management unit (MMU) and invalidate address translation caches such as in the
translation lookaside buffer (TLB). In addition, if the operating system
supports more processes than it can simultaneously hold in main memory, it may
have to swap processes between main memory and disk before the actual switch can
take place.
[Page 71]
Like a process, a thread
executes its own piece of code, independently from other threads. However, in
contrast to processes, no attempt is made to achieve a high degree of
concurrency transparency if this would result in performance degradation.
Therefore, a thread system generally maintains only the minimum information to
allow a CPU to be shared by several threads. In particular, a thread context
often consists of nothing more than the CPU context, along with some other
information for thread management. For example, a thread system may keep track
of the fact that a thread is currently blocked on a mutex variable, so as not
to select it for execution. Information that is not strictly necessary to
manage multiple threads is generally ignored. For this reason, protecting data
against inappropriate access by threads within a single process is left
entirely to application developers.
There are two important
implications of this approach. First of all, the performance of a multithreaded
application need hardly ever be worse than that of its single-threaded
counterpart. In fact, in many cases, multithreading leads to a performance
gain. Second, because threads are not automatically protected against each
other the way processes are, development of multithreaded applications requires
additional intellectual effort. Proper design and keeping things simple, as
usual, help a lot. Unfortunately, current practice does not demonstrate that
this principle is equally well understood.
Thread Usage in Nondistributed Systems
Before discussing the role
of threads in distributed systems, let us first consider their usage in
traditional, nondistributed systems. There are several benefits to
multithreaded processes that have increased the popularity of using thread
systems.
The most important benefit
comes from the fact that in a single-threaded process, whenever a blocking
system call is executed, the process as a whole is blocked. To illustrate,
consider an application such as a spreadsheet program, and assume that a user
continuously and interactively wants to change values. An important property of
a spreadsheet program is that it maintains the functional dependencies between
different cells, often from different spreadsheets. Therefore, whenever a cell
is modified, all dependent cells are automatically updated. When a user changes
the value in a single cell, such a modification can trigger a large series of
computations. If there is only a single thread of control, computation cannot
proceed while the program is waiting for input. Likewise, it is not easy to
provide input while dependencies are being calculated. The easy solution is to
have at least two threads of control: one for handling interaction with the
user and one for updating the spreadsheet. In the mean time, a third thread
could be used for backing up the spreadsheet to disk while the other two are
doing their work.
[Page 72]
Another advantage of
multithreading is that it becomes possible to exploit parallelism when
executing the program on a multiprocessor system. In that case, each thread is
assigned to a different CPU while shared data are stored in shared main memory.
When properly designed, such parallelism can be transparent: the process will
run equally well on a uniprocessor system, albeit slower. Multithreading for
parallelism is becoming increasingly important with the availability of
relatively cheap multiprocessor workstations. Such computer systems are
typically used for running servers in client-server applications.
Multithreading is also
useful in the context of large applications. Such applications are often
developed as a collection of cooperating programs, each to be executed by a
separate process. This approach is typical for a UNIX environment. Cooperation
between programs is implemented by means of interprocess communication (IPC)
mechanisms. For UNIX systems, these mechanisms typically include (named) pipes,
message queues, and shared memory segments [see also Stevens and Rago (2005)].
The major drawback of all IPC mechanisms is that communication often requires
extensive context switching, shown at three different points in Fig. 3-1.
Figure 3-1. Context
switching as the result of IPC.
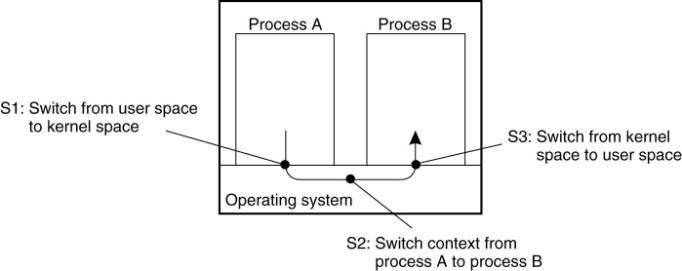
Because IPC requires kernel
intervention, a process will generally first have to switch from user mode to
kernel mode, shown as S 1 in Fig. 3-1. This requires changing the memory map in
the MMU, as well as flushing the TLB. Within the kernel, a process context
switch takes place (S 2 in the figure), after which the other party can be
activated by switching from kernel mode to user mode again (S 3 in Fig. 3-1).
The latter switch again requires changing the MMU map and flushing the TLB.
Instead of using processes, an
application can also be constructed such that different parts are executed by
separate threads. Communication between those parts is entirely dealt with by
using shared data. Thread switching can sometimes be done entirely in user
space, although in other implementations, the kernel is aware of threads and
schedules them. The effect can be a dramatic improvement in performance.
[Page 73]
Finally, there is also a
pure software engineering reason to use threads: many applications are simply
easier to structure as a collection of cooperating threads. Think of applications
that need to perform several (more or less independent) tasks. For example, in
the case of a word processor, separate threads can be used for handling user
input, spelling and grammar checking, document layout, index generation, etc.
Thread Implementation
Threads are often provided
in the form of a thread package. Such a package contains operations to create
and destroy threads as well as operations on synchronization variables such as
mutexes and condition variables. There are basically two approaches to
implement a thread package. The first approach is to construct a thread library
that is executed entirely in user mode. The second approach is to have the
kernel be aware of threads and schedule them.
A user-level thread library
has a number of advantages. First, it is cheap to create and destroy threads.
Because all thread administration is kept in the user's address space, the
price of creating a thread is primarily determined by the cost for allocating
memory to set up a thread stack. Analogously, destroying a thread mainly
involves freeing memory for the stack, which is no longer used. Both operations
are cheap.
A second advantage of
user-level threads is that switching thread context can often be done in just a
few instructions. Basically, only the values of the CPU registers need to be
stored and subsequently reloaded with the previously stored values of the
thread to which it is being switched. There is no need to change memory maps,
flush the TLB, do CPU accounting, and so on. Switching thread context is done
when two threads need to synchronize, for example, when entering a section of
shared data.
However, a major drawback of
user-level threads is that invocation of a blocking system call will
immediately block the entire process to which the thread belongs, and thus also
all the other threads in that process. As we explained, threads are
particularly useful to structure large applications into parts that could be
logically executed at the same time. In that case, blocking on I/O should not
prevent other parts to be executed in the meantime. For such applications,
userlevel threads are of no help.
These problems can be mostly
circumvented by implementing threads in the operating system's kernel.
Unfortunately, there is a high price to pay: every thread operation (creation,
deletion, synchronization, etc.), will have to be carried out by the kernel,
requiring a system call. Switching thread contexts may now become as expensive
as switching process contexts. As a result, most of the performance benefits of
using threads instead of processes then disappears.
[Page 74]
A solution lies in a hybrid
form of user-level and kernel-level threads, generally referred to as
lightweight processes (LWP). An LWP runs in the context of a single
(heavy-weight) process, and there can be several LWPs per process. In addition
to having LWPs, a system also offers a user-level thread package, offering
applications the usual operations for creating and destroying threads. In
addition, the package provides facilities for thread synchronization, such as
mutexes and condition variables. The important issue is that the thread package
is implemented entirely in user space. In other words, all operations on
threads are carried out without intervention of the kernel.
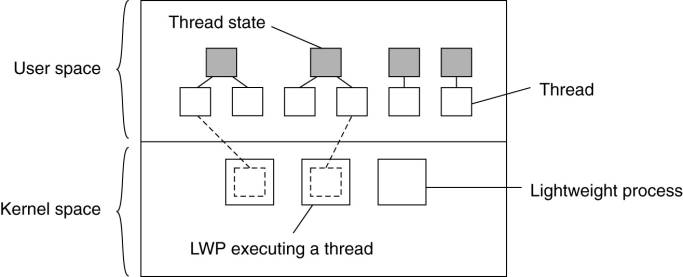
The thread package can be
shared by multiple LWPs, as shown in Fig. 3-2. This means that each LWP can be
running its own (user-level) thread. Multithreaded applications are constructed
by creating threads, and subsequently assigning each thread to an LWP. Assigning
a thread to an LWP is normally implicit and hidden from the programmer.
Figure 3-2. Combining
kernel-level lightweight processes and user-level threads.
The combination of
(user-level) threads and LWPs works as follows. The thread package has a single
routine to schedule the next thread. When creating an LWP (which is done by
means of a system call), the LWP is given its own stack, and is instructed to
execute the scheduling routine in search of a thread to execute. If there are
several LWPs, then each of them executes the scheduler. The thread table, which
is used to keep track of the current set of threads, is thus shared by the
LWPs. Protecting this table to guarantee mutually exclusive access is done by
means of mutexes that are implemented entirely in user space. In other words,
synchronization between LWPs does not require any kernel support.
When an LWP finds a runnable
thread, it switches context to that thread. Meanwhile, other LWPs may be
looking for other runnable threads as well. If a thread needs to block on a
mutex or condition variable, it does the necessary administration and
eventually calls the scheduling routine. When another runnable thread has been
found, a context switch is made to that thread. The beauty of all this is that
the LWP executing the thread need not be informed: the context switch is
implemented completely in user space and appears to the LWP as normal program
code.
[Page 75]
Now let us see what happens
when a thread does a blocking system call. In that case, execution changes from
user mode to kernel mode, but still continues in the context of the current
LWP. At the point where the current LWP can no longer continue, the operating
system may decide to switch context to another LWP, which also implies that a
context switch is made back to user mode. The selected LWP will simply continue
where it had previously left off.
There are several advantages
to using LWPs in combination with a user-level thread package. First, creating,
destroying, and synchronizing threads is relatively cheap and involves no
kernel intervention at all. Second, provided that a process has enough LWPs, a
blocking system call will not suspend the entire process. Third, there is no
need for an application to know about the LWPs. All it sees are user-level
threads. Fourth, LWPs can be easily used in multiprocessing environments, by
executing different LWPs on different CPUs. This multiprocessing can be hidden
entirely from the application. The only drawback of lightweight processes in
combination with user-level threads is that we still need to create and destroy
LWPs, which is just as expensive as with kernel-level threads. However,
creating and destroying LWPs needs to be done only occasionally, and is often
fully controlled by the operating system.
An alternative, but similar
approach to lightweight processes, is to make use of scheduler activations
(Anderson et al., 1991). The most essential difference between scheduler
activations and LWPs is that when a thread blocks on a system call, the kernel
does an upcall to the thread package, effectively calling the scheduler routine
to select the next runnable thread. The same procedure is repeated when a
thread is unblocked. The advantage of this approach is that it saves management
of LWPs by the kernel. However, the use of upcalls is considered less elegant,
as it violates the structure of layered systems, in which calls only to the
next lower-level layer are permitted.
3.1.2. Threads in Distributed Systems
An important property of
threads is that they can provide a convenient means of allowing blocking system
calls without blocking the entire process in which the thread is running. This
property makes threads particularly attractive to use in distributed systems as
it makes it much easier to express communication in the form of maintaining
multiple logical connections at the same time. We illustrate this point by
taking a closer look at multithreaded clients and servers, respectively.
[Page 76]
Multithreaded Clients
To establish a high degree
of distribution transparency, distributed systems that operate in wide-area
networks may need to conceal long interprocess message propagation times. The
round-trip delay in a wide-area network can easily be in the order of hundreds
of milliseconds, or sometimes even seconds.
The usual way to hide
communication latencies is to initiate communication and immediately proceed
with something else. A typical example where this happens is in Web browsers.
In many cases, a Web document consists of an HTML file containing plain text
along with a collection of images, icons, etc. To fetch each element of a Web
document, the browser has to set up a TCP/IP connection, read the incoming
data, and pass it to a display component. Setting up a connection as well as
reading incoming data are inherently blocking operations. When dealing with
long-haul communication, we also have the disadvantage that the time for each
operation to complete may be relatively long.
A Web browser often starts
with fetching the HTML page and subsequently displays it. To hide communication
latencies as much as possible, some browsers start displaying data while it is
still coming in. While the text is made available to the user, including the
facilities for scrolling and such, the browser continues with fetching other
files that make up the page, such as the images. The latter are displayed as
they are brought in. The user need thus not wait until all the components of
the entire page are fetched before the page is made available.
In effect, it is seen that
the Web browser is doing a number of tasks simultaneously. As it turns out,
developing the browser as a multithreaded client simplifies matters
considerably. As soon as the main HTML file has been fetched, separate threads
can be activated to take care of fetching the other parts. Each thread sets up
a separate connection to the server and pulls in the data. Setting up a
connection and reading data from the server can be programmed using the
standard (blocking) system calls, assuming that a blocking call does not
suspend the entire process. As is also illustrated in Stevens (1998), the code
for each thread is the same and, above all, simple. Meanwhile, the user notices
only delays in the display of images and such, but can otherwise browse through
the document.
There is another important
benefit to using multithreaded Web browsers in which several connections can be
opened simultaneously. In the previous example, several connections were set up
to the same server. If that server is heavily loaded, or just plain slow, no
real performance improvements will be noticed compared to pulling in the files
that make up the page strictly one after the other.
However, in many cases, Web
servers have been replicated across multiple machines, where each server
provides exactly the same set of Web documents. The replicated servers are
located at the same site, and are known under the same name. When a request for
a Web page comes in, the request is forwarded to one of the servers, often
using a round-robin strategy or some other load-balancing technique (Katz et
al., 1994). When using a multithreaded client, connections may be set up to
different replicas, allowing data to be transferred in parallel, effectively
establishing that the entire Web document is fully displayed in a much shorter
time than with a nonreplicated server. This approach is possible only if the
client can handle truly parallel streams of incoming data. Threads are ideal
for this purpose.
[Page 77]
Multithreaded Servers
Although there are important
benefits to multithreaded clients, as we have seen, the main use of
multithreading in distributed systems is found at the server side. Practice
shows that multithreading not only simplifies server code considerably, but
also makes it much easier to develop servers that exploit parallelism to attain
high performance, even on uniprocessor systems. However, now that
multiprocessor computers are widely available as general-purpose workstations,
multithreading for parallelism is even more useful.
To understand the benefits
of threads for writing server code, consider the organization of a file server
that occasionally has to block waiting for the disk. The file server normally
waits for an incoming request for a file operation, subsequently carries out
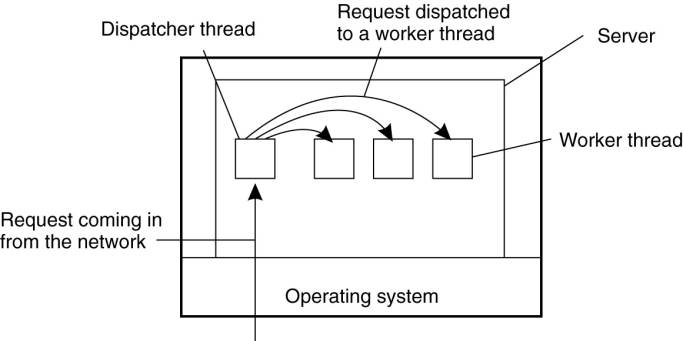
the request, and then sends back the reply. One possible, and particularly
popular organization is shown in Fig. 3-3. Here one thread, the dispatcher,
reads incoming requests for a file operation. The requests are sent by clients
to a well-known end point for this server. After examining the request, the
server chooses an idle (i.e., blocked) worker thread and hands it the request.
Figure 3-3. A multithreaded
server organized in a dispatcher/worker model.
The worker proceeds by
performing a blocking read on the local file system, which may cause the thread
to be suspended until the data are fetched from disk. If the thread is
suspended, another thread is selected to be executed. For example, the
dispatcher may be selected to acquire more work. Alternatively, another worker
thread can be selected that is now ready to run.
[Page 78]
Now consider how the file
server might have been written in the absence of threads. One possibility is to
have it operate as a single thread. The main loop of the file server gets a
request, examines it, and carries it out to completion before getting the next
one. While waiting for the disk, the server is idle and does not process any
other requests. Consequently, requests from other clients cannot be handled. In
addition, if the file server is running on a dedicated machine, as is commonly
the case, the CPU is simply idle while the file server is waiting for the disk.
The net result is that many fewer requests/sec can be processed. Thus threads
gain considerable performance, but each thread is programmed sequentially, in
the usual way.
So far we have seen two
possible designs: a multithreaded file server and a single-threaded file
server. Suppose that threads are not available but the system designers find
the performance loss due to single threading unacceptable. A third possibility
is to run the server as a big finite-state machine. When a request comes in,
the one and only thread examines it. If it can be satisfied from the cache,
fine, but if not, a message must be sent to the disk.
However, instead of
blocking, it records the state of the current request in a table and then goes
and gets the next message. The next message may either be a request for new
work or a reply from the disk about a previous operation. If it is new work,
that work is started. If it is a reply from the disk, the relevant information
is fetched from the table and the reply processed and subsequently sent to the
client. In this scheme, the server will have to make use of nonblocking calls
to send and receive.
In this design, the
"sequential process" model that we had in the first two cases is
lost. The state of the computation must be explicitly saved and restored in the
table for every message sent and received. In effect, we are simulating threads
and their stacks the hard way. The process is being operated as a finite-state
machine that gets an event and then reacts to it, depending on what is in it.
It should now be clear what threads
have to offer. They make it possible to retain the idea of sequential processes
that make blocking system calls (e.g., an RPC to talk to the disk) and still
achieve parallelism. Blocking system calls make programming easier and
parallelism improves performance. The single-threaded server retains the ease
and simplicity of blocking system calls, but gives up some amount of
performance. The finite-state machine approach achieves high performance
through parallelism, but uses nonblocking calls, thus is hard to program. These
models are summarized in Fig. 3-4.
[Page 79]
Figure 3-4. Three ways to
construct a server.
(This item is displayed on
page 78 in the print version)
|
Model |
Characteristics |
|
Threads |
Parallelism, blocking
system calls |
|
Single-threaded process |
No parallelism, blocking
system calls |
|
Finite-state machine |
Parallelism, nonblocking
system calls |
3.2. Virtualization
Threads and processes can be
seen as a way to do more things at the same time. In effect, they allow us
build (pieces of) programs that appear to be executed simultaneously. On a
single-processor computer, this simultaneous execution is, of course, an
illusion. As there is only a single CPU, only an instruction from a single
thread or process will be executed at a time. By rapidly switching between
threads and processes, the illusion of parallelism is created.
This separation between
having a single CPU and being able to pretend there are more can be extended to
other resources as well, leading to what is known as resource virtualization.
This virtualization has been applied for many decades, but has received renewed
interest as (distributed) computer systems have become more commonplace and
complex, leading to the situation that application software is mostly always
outliving its underlying systems software and hardware. In this section, we pay
some attention to the role of virtualization and discuss how it can be
realized.
3.2.1. The Role of
Virtualization in Distributed Systems
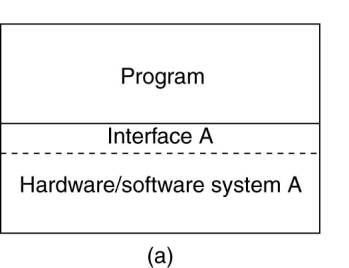
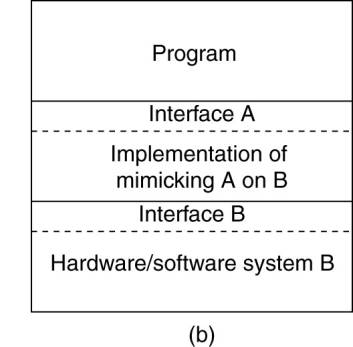
In practice, every
(distributed) computer system offers a programming interface to higher level
software, as shown in Fig. 3-5(a). There are many different types of
interfaces, ranging from the basic instruction set as offered by a CPU to the
vast collection of application programming interfaces that are shipped with
many current middleware systems. In its essence, virtualization deals with
extending or replacing an existing interface so as to mimic the behavior of
another system, as shown in Fig. 3-5(b). We will come to discuss technical
details on virtualization shortly, but let us first concentrate on why
virtualization is important for distributed systems.
Figure 3-5. (a) General
organization between a program, interface, and system. (b) General organization
of virtualizing system A on top of system B.
(This item is displayed on
page 80 in the print version)
One of the most important reasons
for introducing virtualization in the 1970s, was to allow legacy software to
run on expensive mainframe hardware. The software not only included various
applications, but in fact also the operating systems they were developed for.
This approach toward supporting legacy software has been successfully applied
on the IBM 370 mainframes (and their successors) that offered a virtual machine
to which different operating systems had been ported.
As hardware became cheaper,
computers became more powerful, and the number of different operating system
flavors was reducing, virtualization became less of an issue. However, matters
have changed again since the late 1990s for several reasons, which we will now
discuss.
[Page 80]
First, while hardware and
low-level systems software change reasonably fast, software at higher levels of
abstraction (e.g., middleware and applications), are much more stable. In other
words, we are facing the situation that legacy software cannot be maintained in
the same pace as the platforms it relies on. Virtualization can help here by
porting the legacy interfaces to the new platforms and thus immediately opening
up the latter for large classes of existing programs.
Equally important is the
fact that networking has become completely pervasive. It is hard to imagine
that a modern computer is not connected to a network. In practice, this
connectivity requires that system administrators maintain a large and
heterogeneous collection of server computers, each one running very different applications,
which can be accessed by clients. At the same time the various resources should
be easily accessible to these applications. Virtualization can help a lot: the
diversity of platforms and machines can be reduced by essentially letting each
application run on its own virtual machine, possibly including the related
libraries and operating system, which, in turn, run on a common platform.
This last type of
virtualization provides a high degree of portability and flexibility. For
example, in order to realize content delivery networks that can easily support
replication of dynamic content, Awadallah and Rosenblum (2002) argue that
management becomes much easier if edge servers would support virtualization,
allowing a complete site, including its environment to be dynamically copied.
As we will discuss later, it is primarily such portability arguments that make
virtualization an important mechanism for distributed systems.
3.2.2. Architectures of
Virtual Machines
There are many different
ways in which virtualization can be realized in practice. An overview of these
various approaches is described by Smith and Nair (2005). To understand the
differences in virtualization, it is important to realize that computer systems
generally offer four different types of interfaces, at four different levels:
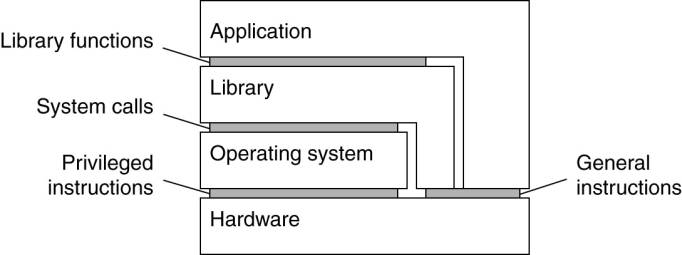
- An interface between the hardware and software,
consisting of machine instructions that can be invoked by any program.
- An interface between the hardware and software,
consisting of machine instructions that can be invoked only by privileged
programs, such as an operating system.
- An interface consisting of system calls as
offered by an operating system.
- An interface consisting of library calls,
generally forming what is known as an application programming interface
(API). In many cases, the aforementioned system calls are hidden by an
API.
These different types are
shown in Fig. 3-6. The essence of virtualization is to mimic the behavior of
these interfaces.
Figure 3-6. Various interfaces
offered by computer systems.
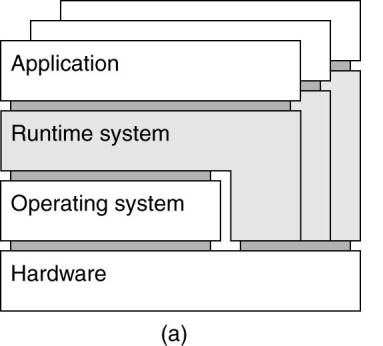
Virtualization can take
place in two different ways. First, we can build a runtime system that
essentially provides an abstract instruction set that is to be used for
executing applications. Instructions can be interpreted (as is the case for the
Java runtime environment), but could also be emulated as is done for running
Windows applications on UNIX platforms. Note that in the latter case, the
emulator will also have to mimic the behavior of system calls, which has proven
to be generally far from trivial. This type of virtualization leads to what
Smith and Nair (2005) call a process virtual machine, stressing that
virtualization is done essentially only for a single process.
An alternative approach
toward virtualization is to provide a system that is essentially implemented as
a layer completely shielding the original hardware, but offering the complete
instruction set of that same (or other hardware) as an interface. Crucial is
the fact that this interface can be offered simultaneously to different
programs. As a result, it is now possible to have multiple, and different
operating systems run independently and concurrently on the same platform. The
layer is generally referred to as a virtual machine monitor (VMM). Typical
examples of this approach are VMware (Sugerman et al., 2001) and Xen (Barham et
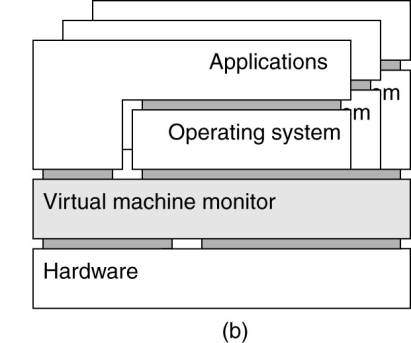
al., 2003). These two different approaches are shown in Fig. 3-7.
[Page 82]
Figure 3-7. (a) A process
virtual machine, with multiple instances of (application, runtime)
combinations. (b) A virtual machine monitor, with multiple instances of
(applications, operating system) combinations.
As argued by Rosenblum and
Garfinkel (2005), VMMs will become increasingly important in the context of
reliability and security for (distributed) systems. As they allow for the
isolation of a complete application and its environment, a failure caused by an
error or security attack need no longer affect a complete machine. In addition,
as we also mentioned before, portability is greatly improved as VMMs provide a
further decoupling between hardware and software, allowing a complete
environment to be moved from one machine to another.
3.3. Clients
In the previous chapters we
discussed the client-server model, the roles of clients and servers, and the
ways they interact. Let us now take a closer look at the anatomy of clients and
servers, respectively. We start in this section with a discussion of clients.
Servers are discussed in the next section.
3.3.1. Networked User
Interfaces
A major task of client
machines is to provide the means for users to interact with remote servers.
There are roughly two ways in which this interaction can be supported. First,
for each remote service the client machine will have a separate counterpart that
can contact the service over the network. A typical example is an agenda
running on a user's PDA that needs to synchronize with a remote, possibly
shared agenda. In this case, an application-level protocol will handle the
synchronization, as shown in Fig. 3-8(a).
[Page 83]
Figure 3-8. (a) A networked
application with its own protocol. (b) A general solution to allow access to
remote applications.
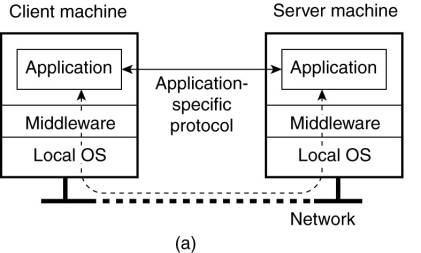
A second solution is to provide
direct access to remote services by only offering a convenient user interface.
Effectively, this means that the client machine is used only as a terminal with
no need for local storage, leading to an applicationneutral solution as shown
in Fig. 3-8(b). In the case of networked user interfaces, everything is
processed and stored at the server. This thin-client approach is receiving more
attention as Internet connectivity increases, and hand-held devices are
becoming more sophisticated. As we argued in the previous chapter, thin-client
solutions are also popular as they ease the task of system management. Let us
take a look at how networked user interfaces can be supported.
Example: The X Window System
Perhaps one of the oldest
and still widely-used networked user interfaces is the X Window system. The X
Window System, generally referred to simply as X, is used to control bit-mapped
terminals, which include a monitor, keyboard, and a pointing device such as a
mouse. In a sense, X can be viewed as that part of an operating system that
controls the terminal. The heart of the system is formed by what we shall call
the X kernel. It contains all the terminal-specific device drivers, and as
such, is generally highly hardware dependent.
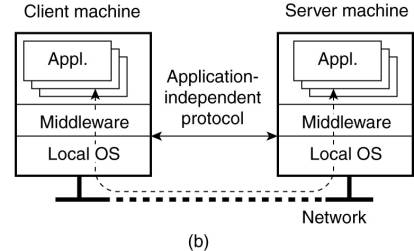
The X kernel offers a relatively
low-level interface for controlling the screen, but also for capturing events
from the keyboard and mouse. This interface is made available to applications
as a library called Xlib. This general organization is shown in Fig. 3-9.
Figure 3-9. The basic
organization of the X Window System.
(This item is displayed on
page 84 in the print version)
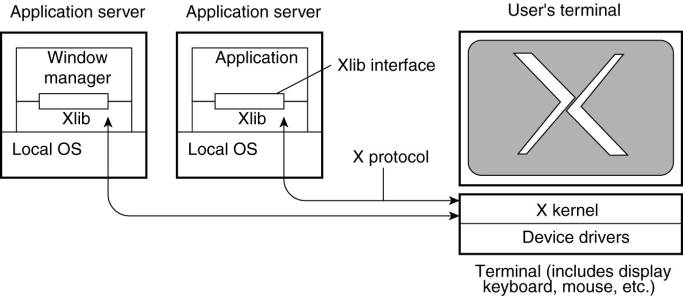
The interesting aspect of X
is that the X kernel and the X applications need not necessarily reside on the
same machine. In particular, X provides the X protocol, which is an
application-level communication protocol by which an instance of Xlib can
exchange data and events with the X kernel. For example, Xlib can send requests
to the X kernel for creating or killing a window, setting colors, and defining
the type of cursor to display, among many other requests. In turn, the X kernel
will react to local events such as keyboard and mouse input by sending event
packets back to Xlib.
[Page 84]
Several applications can
communicate at the same time with the X kernel. There is one specific
application that is given special rights, known as the window manager. This
application can dictate the "look and feel" of the display as it
appears to the user. For example, the window manager can prescribe how each
window is decorated with extra buttons, how windows are to be placed on the
display, and so. Other applications will have to adhere to these rules.
It is interesting to note
how the X window system actually fits into clientserver computing. From what we
have described so far, it should be clear that the X kernel receives requests
to manipulate the display. It gets these requests from (possibly remote)
applications. In this sense, the X kernel acts as a server, while the
applications play the role of clients. This terminology has been adopted by X,
and although strictly speaking is correct, it can easily lead to confusion.
Thin-Client Network Computing
Obviously, applications
manipulate a display using the specific display commands as offered by X. These
commands are generally sent over the network where they are subsequently
executed by the X kernel. By its nature, applications written for X should
preferably separate application logic from user-interface commands.
Unfortunately, this is often not the case. As reported by Lai and Nieh (2002),
it turns out that much of the application logic and user interaction are
tightly coupled, meaning that an application will send many requests to the X
kernel for which it will expect a response before being able to make a next
step. This synchronous behavior may adversely affect performance when operating
over a wide-area network with long latencies.
[Page 85]
There are several solutions
to this problem. One is to re-engineer the implementation of the X protocol, as
is done with NX (Pinzari, 2003). An important part of this work concentrates on
bandwidth reduction by compressing X messages. First, messages are considered
to consist of a fixed part, which is treated as an identifier, and a variable
part. In many cases, multiple messages will have the same identifier in which
case they will often contain similar data. This property can be used to send
only the differences between messages having the same identifier.
Both the sending and
receiving side maintain a local cache of which the entries can be looked up
using the identifier of a message. When a message is sent, it is first looked
up in the local cache. If found, this means that a previous message with the
same identifier but possibly different data had been sent. In that case,
differential encoding is used to send only the differences between the two. At
the receiving side, the message is also looked upin the local cache, after
which decoding through the differences can take place. In the cache miss,
standard compression techniques are used, which generally already leads to
factor four improvement in bandwidth. Overall, this technique has reported
bandwidth reductions up to a factor 1000, which allows X to also run through
low-bandwidth links of only 9600 kbps.
An important side effect of
caching messages is that the sender and receiver have shared information on
what the current status of the display is. For example, the application can
request geometric information on various objects by simply requesting lookups in
the local cache. Having this shared information alone already reduces the
number of messages required to keep the application and the display
synchronized.
Despite these improvements,
X still requires having a display server running. This may be asking a lot,
especially if the display is something as simple as a cell phone. One solution
to keeping the software at the display very simple is to let all the processing
take place at the application side. Effectively, this means that the entire
display is controlled up to the pixel level at the application side. Changes in
the bitmap are then sent over the network to the display, where they are
immediately transferred to the local frame buffer.
This approach requires
sophisticated compression techniques in order to prevent bandwidth availability
to become a problem. For example, consider displaying a video stream at a rate
of 30 frames per second on a 320 x 240 screen. Such a screen size is common for
many PDAs. If each pixel is encoded by 24 bits, then without compression we
would need a bandwidth of approximately 53 Mbps. Compression is clearly needed
in such a case, and many techniques are currently being deployed. Note,
however, that compression requires decompression at the receiver, which, in
turn, may be computationally expensive without hardware support. Hardware
support can be provided, but this raises the devices cost.
[Page 86]
The drawback of sending raw
pixel data in comparison to higher-level protocols such as X is that it is
impossible to make any use of application semantics, as these are effectively
lost at that level. Baratto et al. (2005) propose a different technique. In
their solution, referred to as THINC, they provide a few high-level display
commands that operate atthe level of the video device drivers. These commands
are thus device dependent, more powerful than raw pixel operations, but less
powerful compared to what a protocol such as X offers. The result is that
display servers can be much simpler, which is good for CPU usage, while at the
same time application-dependent optimizations can be used to reduce bandwidth
and synchronization.
In THINC, display requests
from the application are intercepted and translated into the lower level
commands. By intercepting application requests, THINC can make use of
application semantics to decide what combination of lower level commands can be
used best. Translated commands are not immediately sent out to the display, but
are instead queued. By batching several commands it is possible to aggregate display
commands into a single one, leading to fewer messages. For example, when a new
command for drawing in a particular region of the screen effectively overwrites
what a previous (and still queued) command would have established, the latter
need not be sent out to the display. Finally, instead of letting the display
ask for refreshments, THINC always pushes updates as they come available. This
push approach saves latency as there is no need for an update request to be
sent out bythe display.
As it turns out, the
approach followed by THINC provides better overall performance, although very
much in line with that shown by NX. Details on performance comparison can be
found in Baratto et al. (2005).
Compound Documents
Modern user interfaces do a
lot more than systems such as X or its simple applications. In particular, many
user interfaces allow applications to share a single graphical window, and to
use that window to exchange data through user actions. Additional actions that
can be performed by the user include what are generally called drag-and-drop
operations, and in-place editing, respectively.
A typical example of
drag-and-drop functionality is moving an icon representing a file A to an icon
representing a trash can, resulting in the file being deleted. In this case,
the user interface will need to do more than just arrange icons on the display:
it will have to pass the name of the file A to the application associated with
the trash can as soon as A's icon has been moved above that of the trash can application.
Other examples easily come to mind.
In-place editing can best be
illustrated by means of a document containing text and graphics. Imagine that
the document is being displayed within a standard word processor. As soon as
the user places the mouse above an image, the user interface passes that
information to a drawing program to allow the user to modify the image. For
example, the user may have rotated the image, which may effect the placement of
the image in the document. The user interface therefore finds out what the new
height and width of the image are, and passes this information to the word
processor. The latter, in turn, can then automatically update the page layout
of the document.
[Page 87]
The key idea behind these user
interfaces is the notion of a compound document, which can be defined as a
collection of documents, possibly of very different kinds (like text, images,
spreadsheets, etc.), which are seamlessly integrated at the user-interface
level. A user interface that can handle compound documents hides the fact that
different applications operate on different parts of the document. To the user,
all parts are integrated in a seamless way. When changing one part affects
other parts, the user interface can take appropriate measures, for example, by
notifying the relevant applications.
Analogous to the situation
described for the X Window System, the applications associated with a compound
document do not have to execute on the client's machine. However, it should be
clear that user interfaces that support compound documents may have to do a lot
more processing than those that do not.
3.3.2. Client-Side
Software for Distribution Transparency
Client software comprises
more than just user interfaces. In many cases, parts of the processing and data
level in a client-server application are executed on the client side as well. A
special class is formed by embedded client software, such as for automatic
teller machines (ATMs), cash registers, barcode readers, TV set-top boxes, etc.
In these cases, the user interface is a relatively small part of the client
software, in contrast to the local processing and communication facilities.
Besides the user interface
and other application-related software, client software comprises components
for achieving distribution transparency. Ideally, a client should not be aware
that it is communicating with remote processes. In contrast, distribution is
often less transparent to servers for reasons of performance and correctness.
For example, in Chap. 6 we will show that replicated servers sometimes need to
communicate in order to establish that operations are performed in a specific
order at each replica.
Access transparency is
generally handled through the generation of a client stub from an interface
definition of what the server has to offer. The stub provides the same
interface as available at the server, but hides the possible differences in
machine architectures, as well as the actual communication.
There are different ways to
handle location, migration, and relocation transparency. Using a convenient
naming system is crucial, as we shall also see in the next chapter. In many
cases, cooperation with client-side software is also important. For example,
when a client is already bound to a server, the client can be directly informed
when the server changes location. In this case, the client's middleware can
hide the server's current geographical location from the user, and also
transparently rebind to the server if necessary. At worst, the client's
application may notice a temporary loss of performance.
[Page 88]
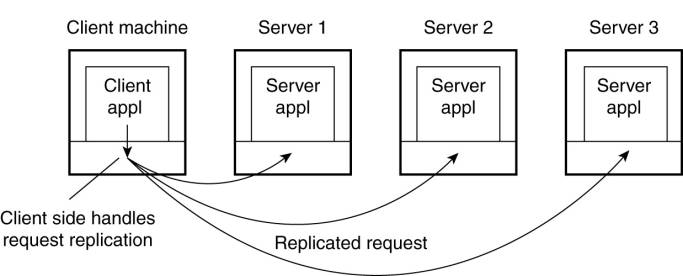
In a similar way, many
distributed systems implement replication transparency by means of client-side
solutions. For example, imagine a distributed system with replicated servers, Such
replication can be achieved by forwarding a request to each replica, as shown
in Fig. 3-10. Client-side software can transparently collect all responses and
pass a single response to the client application.
Figure 3-10. Transparent
replication of a server using a client-side solution.
Finally, consider failure
transparency. Masking communication failures with a server is typically done
through client middleware. For example, client middle-ware can be configured to
repeatedly attempt to connect to a server, or perhaps try another server after
several attempts. There are even situations in which the client middleware
returns data it had cached during a previous session, as is sometimes done by
Web browsers that fail to connect to a server.
Concurrency transparency can
be handled through special intermediate servers, notably transaction monitors,
and requires less support from client software. Likewise, persistence
transparency is often completely handled at the server.
3.4. Servers
Let us now take a closer
look at the organization of servers. In the following pages, we first
concentrate on a number of general design issues for servers, to be followed by
a discussion of server clusters.
3.4.1. General Design
Issues
A server is a process
implementing a specific service on behalf of a collection of clients. In
essence, each server is organized in the same way: it waits for an incoming
request from a client and subsequently ensures that the request is taken care
of, after which it waits for the next incoming request.
[Page 89]
There are several ways to
organize servers. In the case of an iterative server, the server itself handles
the request and, if necessary, returns a response to the requesting client. A
concurrent server does not handle the request itself, but passes it to a
separate thread or another process, after which it immediately waits for the
next incoming request. A multithreaded server is an example of a concurrent
server. An alternative implementation of a concurrent server is to fork a new
process for each new incoming request. This approach is followed in many UNIX
systems. The thread or process that handles the request is responsible for
returning a response to the requesting client.
Another issue is where
clients contact a server. In all cases, clients send requests to an end point,
also called a port, at the machine where the server is running. Each server
listens to a specific end point. How do clients know the end point of a
service? One approach is to globally assign end points for well-known services.
For example, servers that handle Internet FTP requests always listen to TCP
port 21. Likewise, an HTTP server for the World Wide Web will always listen to
TCP port 80. These end points have been assigned by the Internet Assigned
Numbers Authority (IANA), and are documented in Reynolds and Postel (1994).
With assigned end points, the client only needs to find the network address of
the machine where the server is running. As we explain in the next chapter,
name services can be used for that purpose.
There are many services that
do not require a preassigned end point. For example, a time-of-day server may
use an end point that is dynamically assigned to it by its local operating
system. In that case, a client will first have to look up the end point. One
solution is to have a special daemon running on each machine that runs servers.
The daemon keeps track of the current end point of each service implemented by
a co-located server. The daemon itself listens to a well-known end point. A
client will first contact the daemon, request the end point, and then contact
the specific server, as shown in Fig. 3-11(a).
Figure 3-11. (a)
Client-to-server binding using a daemon. (b) Client-to-server binding using a
superserver.
(This item is displayed on
page 90 in the print version)
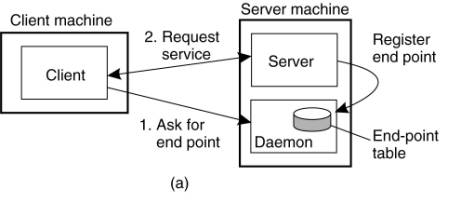
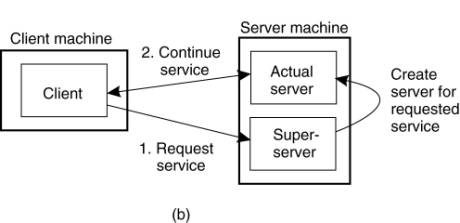
It is common to associate an
end point with a specific service. However, actually implementing each service
by means of a separate server may be a waste of resources. For example, in a
typical UNIX system, it is common to have lots of servers running
simultaneously, with most of them passively waiting until a client request
comes in. Instead of having to keep track of so many passive processes, it is
often more efficient to have a single superserver listening to each end point
associated with a specific service, as shown in Fig. 3-11(b). This is the
approach taken, for example, with the inetd daemon in UNIX. Inetd listens to a
number of well-known ports for Internet services. When a request comes in, the
daemon forks a process to take further care of the request. That process will
exit after it is finished.
Another issue that needs to
be taken into account when designing a server is whether and how a server can
be interrupted. For example, consider a user who has just decided to upload a
huge file to an FTP server. Then, suddenly realizing that it is the wrong file,
he wants to interrupt the server to cancel further data transmission. There are
several ways to do this. One approach that works only too well in the current
Internet (and is sometimes the only alternative) is for the user to abruptly
exit the client application (which will automatically break the connection to
the server), immediately restart it, and pretend nothing happened. The server
will eventually tear down the old connection, thinking the client has probably
crashed.
[Page 90]
A much better approach for
handling communication interrupts is to develop the client and server such that
it is possible to send out-of-band data, which is data that is to be processed
by the server before any other data from that client. One solution is to let
the server listen to a separate control end point to which the client sends
out-of-band data, while at the same time listening (with a lower priority) to the
end point through which the normal data passes. Another solution is to send
out-of-band data across the same connection through which the client is sending
the original request. In TCP, for example, it is possible to transmit urgent
data. When urgent data are received at the server, the latter is interrupted
(e.g., through a signal in UNIX systems), after which it can inspect the data
and handle them accordingly.
A final, important design
issue, is whether or not the server is stateless. A stateless server does not
keep information on the state of its clients, and can change its own state
without having to inform any client (Birman, 2005). A Web server, for example,
is stateless. It merely responds to incoming HTTP requests, which can be either
for uploading a file to the server or (most often) for fetching a file. When
the request has been processed, the Web server forgets the client completely.
Likewise, the collection of files that a Web server manages (possibly in
cooperation with a file server), can be changed without clients having to be
informed.
[Page 91]
Note that in many stateless
designs, the server actually does maintain information on its clients, but
crucial is the fact that if this information is lost, it will not lead to a disruption
of the service offered by the server. For example, a Web server generally logs
all client requests. This information is useful, for example, to decide whether
certain documents should be replicated, and where they should be replicated to.
Clearly, there is no penalty other than perhaps in the form of suboptimal
performance if the log is lost.
A particular form of a
stateless design is where the server maintains what is known as soft state. In
this case, the server promises to maintain state on behalf of the client, but
only for a limited time. After that time has expired, the server falls back to
default behavior, thereby discarding any information it kept on account of the
associated client. An example of this type of state is a server promising to
keep a client informed about updates, but only for a limited time. After that,
the client is required to poll the server for updates. Soft-state approaches
originate from protocol design in computer networks, but can be equally applied
to server design (Clark, 1989; and Lui et al., 2004).
In contrast, a stateful
server generally maintains persistent information on its clients. This means
that the information needs to be explicitly deleted by the server. A typical
example is a file server that allows a client to keep a local copy of a file,
even for performing update operations. Such a server would maintain a table
containing (client, file) entries. Such a table allows the server to keep track
of which client currently has the update permissions on which file, and thus
possibly also the most recent version of that file.
This approach can improve
the performance of read and write operations as perceived by the client.
Performance improvement over stateless servers is often an important benefit of
stateful designs. However, the example also illustrates the major drawback of
stateful servers. If the server crashes, it has to recover its table of
(client, file) entries, or otherwise it cannot guarantee that it has processed
the most recent updates on a file. In general, a stateful server needs to
recover its entire state as it was just before the crash. As we discuss in
Chap. 8, enabling recovery can introduce considerable complexity. In a
stateless design, no special measures need to be taken at all for a crashed
server to recover. It simply starts running again, and waits for client
requests to come in.
Ling et al. (2004) argue
that one should actually make a distinction between (temporary) session state
and permanent state. The example above is typical for session state: it is
associated with a series of operations by a single user and should be
maintained for a some time, but not indefinitely. As it turns out, session
state is often maintained in three-tiered client-server architectures, where
the application server actually needs to access a database server through a
series of queries before being able to respond to the requesting client. The
issue here is that no real harm is done if session state is lost, provided that
the client can simply reissue the original request. This observation allows for
simpler and less reliable storage of state.
[Page 92]
What remains for permanent
state is typically information maintained in databases, such as customer
information, keys associated with purchased software, etc. However, for most
distributed systems, maintaining session state already implies a stateful
design requiring special measures when failures do happen and making explicit
assumptions about the durability of state stored at the server. We will return
to these matters extensively when discussing fault tolerance.
When designing a server, the
choice for a stateless or stateful design should not affect the services
provided by the server. For example, if files have to be opened before they can
be read from, or written to, then a stateless server should one way or the
other mimic this behavior. A common solution, which we discuss in more detail
in Chap. 11, is that the server responds to a read or write request by first
opening the referred file, then does the actual read or write operation, and
immediately closes the file again.
In other cases, a server may
want to keep a record on a client's behavior so that it can more effectively
respond to its requests. For example, Web servers sometimes offer the possibility
to immediately direct a client to his favorite pages. This approach is possible
only if the server has history information on that client. When the server
cannot maintain state, a common solution is then to let the client send along
additional information on its previous accesses. In the case of the Web, this
information is often transparently stored by the client's browser in what is
called a cookie, which is a small piece of data containing client-specific
information that is of interest to the server. Cookies are never executed by a
browser; they are merely stored.
The first time a client
accesses a server, the latter sends a cookie along with the requested Web pages
back to the browser, after which the browser safely tucks the cookie away. Each
subsequent time the client accesses the server, its cookie for that server is
sent along with the request. Although in principle, this approach works fine,
the fact that cookies are sent back for safekeeping by the browser is often
hidden entirely from users. So much for privacy. Unlike most of grandma's
cookies, these cookies should stay where they are baked.
3.4.2. Server Clusters
In Chap. 1 we briefly
discussed cluster computing as one of the many appearances of distributed
systems. We now take a closer look at the organization of server clusters,
along with the salient design issues.
[Page 93]
General Organization
Simply put, a server cluster
is nothing else but a collection of machines connected through a network, where
each machine runs one or more servers. The server clusters that we consider
here, are the ones in which the machines are connected through a local-area
network, often offering high bandwidth and low latency.
In most cases, a server
cluster is logically organized into three tiers, as shown in Fig. 3-12. The
first tier consists of a (logical) switch through which client requests are
routed. Such a switch can vary widely. For example, transport-layer switches
accept incoming TCP connection requests and pass requests on to one of servers
in the cluster, as we discuss below. A completely different example is a Web
server that accepts incoming HTTP requests, but that partly passes requests to
application servers for further processing only to later collect results and
return an HTTP response.
Figure 3-12. The general
organization of a three-tiered server cluster.
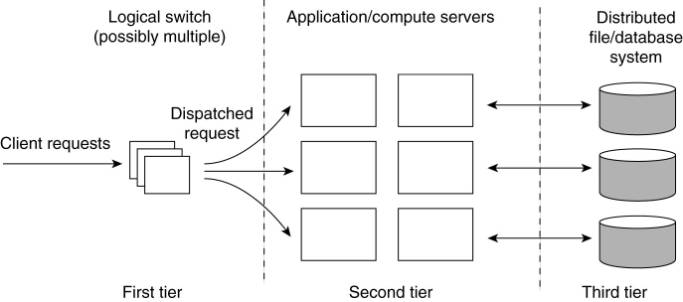
As in any multitiered
client-server architecture, many server clusters also contain servers dedicated
to application processing. In cluster computing, these are typically servers
running on high-performance hardware dedicated to delivering compute power.
However, in the case of enterprise server clusters, it may be the case that
applications need only run on relatively low-end machines, as the required
compute power is not the bottleneck, but access to storage is.
This brings us the third
tier, which consists of data-processing servers, notably file and database
servers. Again, depending on the usage of the server cluster, these servers may
be running an specialized machines, configured for high-speed disk access and
having large server-side data caches.
Of course, not all server
clusters will follow this strict separation. It is frequently the case that
each machine is equipped with its own local storage, often integrating application
and data processing in a single server leading to a twotiered architecture. For
example, when dealing with streaming media by means of a server cluster, it is
common to deploy a two-tiered system architecture, where each machine acts as a
dedicated media server (Steinmetz and Nahrstedt, 2004).
[Page 94]
When a server cluster offers
multiple services, it may happen that different machines run different
application servers. As a consequence, the switch will have to be able to
distinguish services or otherwise it cannot forward requests to the proper
machines. As it turns out, many second-tier machines run only a single
application. This limitation comes from dependencies on available software and
hardware, but also that different applications are often managed by different
administrators. The latter do not like to interfere with each other's machines.
As a consequence, we may
find that certain machines are temporarily idle, while others are receiving an
overload of requests. What would be useful is to temporarily migrate services
to idle machines. A solution proposed in Awadallah and Rosenblum (2004), is to
use virtual machines allowing a relative easy migration of code to real
machines. We will return to code migration later in this chapter.
Let us take a closer look at
the first tier, consisting of the switch. An important design goal for server
clusters is to hide the fact that there are multiple servers. In other words,
client applications running on remote machines should have no need to know anything
about the internal organization of the cluster. This access transparency is
invariably offered by means of a single access point, in turn implemented
through some kind of hardware switch such as a dedicated machine.
The switch forms the entry
point for the server cluster, offering a single network address. For
scalability and availability, a server cluster may have multiple access points,
where each access point is then realized by a separate dedicated machine. We
consider only the case of a single access point.
A standard way of accessing
a server cluster is to set up a TCP connection over which application-level
requests are then sent as part of a session. A session ends by tearing down the
connection. In the case of transport-layer switches, the switch accepts
incoming TCP connection requests, and hands off such connections to one of the
servers (Hunt et al, 1997; and Pai et al., 1998). The principle working of what
is commonly known as TCP handoff is shown in Fig. 3-13.
Figure 3-13. The principle
of TCP handoff.
(This item is displayed on
page 95 in the print version)
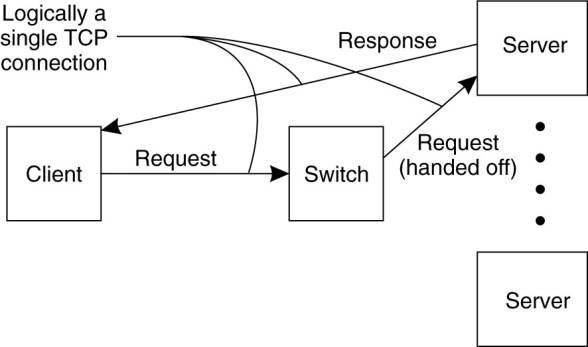
When the switch receives a
TCP connection request, it subsequently identifies the best server for handling
that request, and forwards the request packet to that server. The server, in
turn, will send an acknowledgment back to the requesting client, but inserting
the switch's IP address as the source field of the header of the IP packet
carrying the TCP segment. Note that this spoofing is necessary for the client
to continue executing the TCP protocol: it is expecting an answer back from the
switch, not from some arbitrary server it is has never heard of before.
Clearly, a TCP-handoff implementation requires operating-system level
modifications.
It can already be seen that
the switch can play an important role in distributing the load among the
various servers. By deciding where to forward a request to, the switch also
decides which server is to handle further processing of the request. The
simplest load-balancing policy that the switch can follow is round robin: each
time it picks the next server from its list to forward a request to.
[Page 95]
More advanced server
selection criteria can be deployed as well. For example, assume multiple
services are offered by the server cluster. If the switch can distinguish those
services when a request comes in, it can then take informed decisions on where
to forward the request to. This server selection can still take place at the
transport level, provided services are distinguished by means of a port number.
One step further is to have the switch actually inspect the payload of the
incoming request. This method can be applied only if it is known what that
payload can look like. For example, in the case of Web servers, the switch can
eventually expect an HTTP request, based on which it can then decide who is to
process it. We will return to such content-aware request distribution when we
discuss Web-based systems in Chap. 12.
Distributed Servers
The server clusters
discussed so far are generally rather statically configured. In these clusters,
there is often an separate administration machine that keeps track of available
servers, and passes this information to other machines as appropriate, such as
the switch.
As we mentioned, most server
clusters offer a single access point. When that point fails, the cluster
becomes unavailable. To eliminate this potential problem, several access points
can be provided, of which the addresses are made publicly available. For
example, the Domain Name System (DNS) can return several addresses, all
belonging to the same host name. This approach still requires clients to make
several attempts if one of the addresses fails. Moreover, this does not solve
the problem of requiring static access points.
[Page 96]
Having stability, like a
long-living access point, is a desirable feature from a client's and a server's
perspective. On the other hand, it also desirable to have a high degree of
flexibility in configuring a server cluster, including the switch. This
observation has lead to a design of a distributed server which effectively is
nothing but a possibly dynamically changing set of machines, with also possibly
varying access points, but which nevertheless appears to the outside world as a
single, powerful machine. The design of such a distributed server is given in
Szymaniak et al. (2005). We describe it briefly here.
The basic idea behind a
distributed server is that clients benefit from a robust, high-performing,
stable server. These properties can often be provided by high-end mainframes,
of which some have an acclaimed mean time between failure of more than 40
years. However, by grouping simpler machines transparently into a cluster, and
not relying on the availability of a single machine, it may be possible to
achieve a better degree of stability than by each component individually. For
example, such a cluster could be dynamically configured from end-user machines,
as in the case of a collaborative distributed system.
Let us concentrate on how a
stable access point can be achieved in such a system. The main idea is to make
use of available networking services, notably mobility support for IP version 6
(MIPv6). In MIPv6, a mobile node is assumed to have a home network where it
normally resides and for which it has an associated stable address, known as
its home address (HoA). This home network has a special router attached, known
as the home agent, which will take care of traffic to the mobile node when it
is away. To this end, when a mobile node attaches to a foreign network, it will
receive a temporary care-of address (CoA) where it can be reached. This care-of
address is reported to the node's home agent who will then see to it that all
traffic is forwarded to the mobile node. Note that applications communicating
with the mobile node will only see the address associated with the node's home
network. They will never see the care-of address.
This principle can be used
to offer a stable address of a distributed server. In this case, a single
unique contact address is initially assigned to the server cluster. The contact
address will be the server's life-time address to be used in all communication
with the outside world. At any time, one node in the distributed server will
operate as an access point using that contact address, but this role can easily
be taken over by another node. What happens is that the access point records
its own address as the care-of address at the home agent associated with the
distributed server. At that point, all traffic will be directed to the access
point, who will then take care in distributing requests among the currently
participating nodes. If the access point fails, a simple fail-over mechanism
comes into place by which another access point reports a new care-of address.
This simple configuration
would make the home agent as well as the access point a potential bottleneck as
all traffic would flow through these two machines. This situation can be
avoided by using an MIPv6 feature known as route optimization. Route
optimization works as follows. Whenever a mobile node with home address HA
reports its current care-of address, say CA, the home agent can forward CA to a
client. The latter will then locally store the pair (HA, CA). From that moment
on, communication will be directly forwarded to CA. Although the application at
the client side can still use the home address, the underlying support software
for MIPv6 will translate that address to CA and use that instead.
[Page 97]
Route optimization can be
used to make different clients believe they are communicating with a single
server, where, in fact, each client is communicating with a different member
node of the distributed server, as shown in Fig. 3-14. To this end, when an
access point of a distributed server forwards a request from client C1 to, say
node S1 (with address CA1), it passes enough information to S1 to let it
initiate the route optimization procedure by which eventually the client is
made to believe that the care-of address is CA1. This will allow C1 to store
the pair (HA, CA1). During this procedure, the access point (as well as the
home agent) tunnel most of the traffic between C1 and S1. This will prevent the
home agent from believing that the care-of address has changed, so that it will
continue to communicate with the access point.
Figure 3-14. Route
optimization in a distributed server.
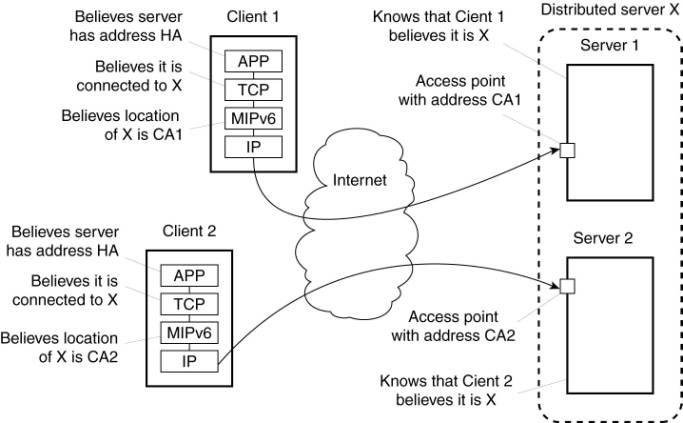
Of course, while this route
optimization procedure is taking place, requests from other clients may still come
in. These remain in a pending state at the access point until they can be
forwarded. The request from another client C2 may then be forwarded to member
node S2 (with address CA2), allowing the latter to let client C2 store the pair
(HA, CA2). As a result, different clients will be directly communicating with
different members of the distributed server, where each client application
still has the illusion that this server has address HA. The home agent
continues to communicate with the access point talking to the contact address.
[Page 98]
3.4.3. Managing Server
Clusters
A server cluster should
appear to the outside world as a single computer, as is indeed often the case.
However, when it comes to managing a cluster, the situation changes
dramatically. Several attempts have been made to ease the management of server
clusters as we discuss next.
Common Approaches
By far the most common
approach to managing a server cluster is to extend the traditional managing
functions of a single computer to that of a cluster. In its most primitive
form, this means that an administrator can log into a node from a remote client
and execute local managing commands to monitor, install, and change components.
Somewhat more advanced is to
hide the fact that you need to login into a node and instead provide an
interface at an administration machine that allows to collect information from
one or more servers, upgrade components, add and remove nodes, etc. The main
advantage of the latter approach is that collective operations, which operate
on a group of servers, can be more easily provided. This type of managing
server clusters is widely applied in practice, exemplified by management
software such as Cluster Systems Management from IBM (Hochstetler and Beringer,
2004).
However, as soon as clusters
grow beyond several tens of nodes, this type of management is not the way to
go. Many data centers need to manage thousands of servers, organized into many
clusters but all operating collaboratively. Doing this by means of centralized
administration servers is simply out of the question. Moreover, it can be
easily seen that very large clusters need continuous repair management
(including upgrades). To simplify matters, if p is the probability that a
server is currently faulty, and we assume that faults are independent, then for
a cluster of N servers to operate without a single server being faulty is
(1-p)N. With p=0.001 and N=1000, there is only a 36 percent chance that all the
servers are correctly functioning.
As it turns out, support for
very large server clusters is almost always ad hoc. There are various rules of
thumb that should be considered (Brewer, 2001), but there is no systematic
approach to dealing with massive systems management. Cluster management is
still very much in its infancy, although it can be expected that the
self-managing solutions as discussed in the previous chapter will eventually
find their way in this area, after more experience with them has been gained.
[Page 99]
Example: PlanetLab
Let us now take a closer
look at a somewhat unusual cluster server. PlanetLab is a collaborative
distributed system in which different organizations each donate one or more
computers, adding up to a total of hundreds of nodes. Together, these computers
form a 1-tier server cluster, where access, processing, and storage can all
take place on each node individually. Management of PlanetLab is by necessity
almost entirely distributed. Before we explain its basic principles, let us
first describe the main architectural features (Peterson et al., 2005).
In PlanetLab, an
organization donates one or more nodes, where each node is easiest thought of
as just a single computer, although it could also be itself a cluster of
machines. Each node is organized as shown in Fig. 3-15. There are two important
components (Bavier et al., 2004). The first one is the virtual machine monitor
(VMM), which is an enhanced Linux operating system. The enhancements mainly
comprise adjustments for supporting the second component, namely vservers. A
(Linux) vserver can best be thought of as a separate environment in which a
group of processes run. Processes from different vservers are completely
independent. They cannot directly share any resources such as files, main
memory, and network connections as is normally the case with processes running
on top of an operating systems. Instead, a vserver provides an environment
consisting of its own collection of software packages, programs, and networking
facilities. For example, a vserver may provide an environment in which a
process will notice that it can make use of Python 1.5.2 in combination with an
older Apache Web server, say httpd 1.3.1. In contrast, another vserver may
support the latest versions of Python and httpd. In this sense, calling a
vserver a "server" is a bit of a misnomer as it really only isolates
groups of processes from each other. We return to vservers briefly below.
Figure 3-15. The basic
organization of a PlanetLab node.
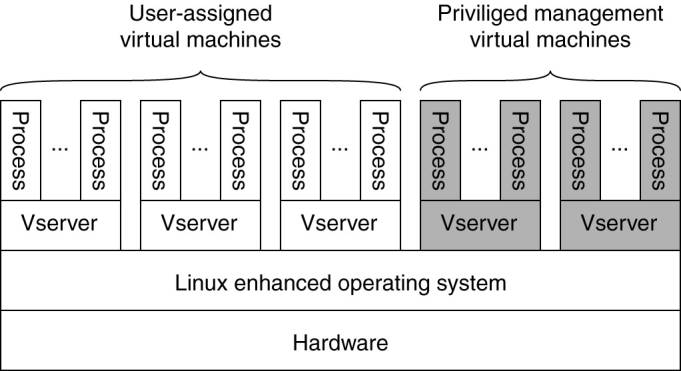
The Linux VMM ensures that vservers
are separated: processes in different vservers are executed concurrently and
independently, each making use only of the software packages and programs
available in their own environment. The isolation between processes in
different vservers is strict. For example, two processes in different vservers
may have the same user ID, but this does not imply that they stem from the same
user. This separation considerably eases supporting users from different
organizations that want to use PlanetLab as, for example, a testbed to
experiment with completely different distributed systems and applications.
[Page 100]
To support such
experimentations, PlanetLab introduces the notion of a slice, which is a set of
vservers, each vserver running on a different node. A slice can thus be thought
of as a virtual server cluster, implemented by means of a collection of virtual
machines. The virtual machines in PlanetLab run on top of the Linux operating
system, which has been extended with a number of kernel modules
There are several issues
that make management of PlanetLab a special problem. Three salient ones are:
1. Nodes belong to different organizations. Each
organization should be allowed to specify who is allowed to run applications on
their nodes, and restrict resource usage appropriately.
2. There are various monitoring tools available, but
they all assume a very specific combination of hardware and software. Moreover,
they are all tailored to be used within a single organization.
3. Programs from different slices but running on the
same node should not interfere with each other. This problem is similar to
process independence in operating systems.
Let us take a look at each
of these issues in more detail.
Central to managing
PlanetLab resources is the node manager. Each node has such a manager,
implemented by means of a separate vserver, whose only task is to create other
vservers on the node it manages and to control resource allocation. The node
manager does not make any policy decisions; it is merely a mechanism to provide
the essential ingredients to get a program running on a given node.
Keeping track of resources
is done by means of a resource specification, or rspec for short. An rspec
specifies a time interval during which certain resources have been allocated.
Resources include disk space, file descriptors, inbound and outbound network
bandwidth, transport-level end points, main memory, and CPU usage. An rspec is
identified through a globally unique 128-bit identifier known as a resource
capability (rcap). Given an rcap, the node manager can look up the associated
rspec in a local table.
Resources are bound to
slices. In other words, in order to make use of resources, it is necessary to
create a slice. Each slice is associated with a service provider, which can
best be seen as an entity having an account on PlanetLab. Every slice can then
be identified by a (principal_id, slice_tag) pair, where the principal_id
identifies the provider and slice_tag is an identifier chosen by the provider.
[Page 101]
To create a new slice, each
node will run a slice creation service (SCS), which, in turn, can contact the
node manager requesting it to create a vserver and to allocate resources. The
node manager itself cannot be contacted directly over a network, allowing it to
concentrate only on local resource management. In turn, the SCS will not accept
slice-creation requests from just anybody. Only specific slice authorities are
eligible for requesting the creation of a slice. Each slice authority will have
access rights to a collection of nodes. The simplest model is that there is
only a single slice authority that is allowed to request slice creation on all
nodes.
To complete the picture, a
service provider will contact a slice authority and request it to create a
slice across a collection of nodes. The service provider will be known to the
slice authority, for example, because it has been previously authenticated and
subsequently registered as a PlanetLab user. In practice, Planet-Lab users
contact a slice authority by means of a Web-based service. Further details can
be found in Chun and Spalink (2003).
What this procedure reveals
is that managing PlanetLab is done through intermediaries. One important class of
such intermediaries is formed by slice authorities. Such authorities have
obtained credentials at nodes to create slides. Obtaining these credentials has
been achieved out-of-band, essentially by contacting system administrators at
various sites. Obviously, this is a time-consuming process which not be carried
out by end users (or, in PlanetLab terminology, service providers).
Besides slice authorities,
there are also management authorities. Where a slice authority concentrates
only on managing slices, a management authority is responsible for keeping an
eye on nodes. In particular, it ensures that the nodes under its regime run the
basic PlanetLab software and abide to the rules set out by PlanetLab. Service
providers trust that a management authority provides nodes that will behave
properly.
[Page 102]
This organization leads to
the management structure shown in Fig. 3-16, described in terms of trust
relationships in Peterson et al. (2005). The relations are as follows:
- A node owner puts its node under the regime of a
management authority, possibly restricting usage where appropriate.
- A management authority provides the necessary
software to add a node to PlanetLab.
- A service provider registers itself with a
management authority, trusting it to provide well-behaving nodes.
- A service provider contacts a slice authority to
create a slice on a collection of nodes.
- The slice authority needs to authenticate the
service provider.
- A node owner provides a slice creation service
for a slice authority to create slices. It essentially delegates resource
management to the slice authority.
- A management authority delegates the creation of
slices to a slice authority.
Figure 3-16. The management
relationships between various PlanetLab entities.
(This item is displayed on
page 101 in the print version)
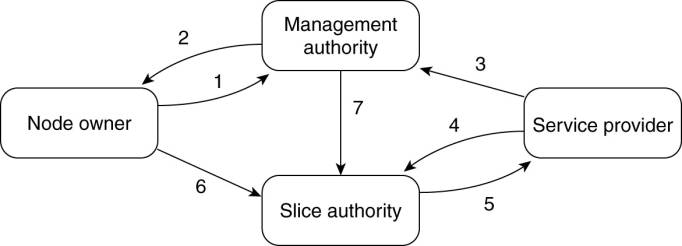
These relationships cover
the problem of delegating nodes in a controlled way such that a node owner can
rely on a decent and secure management. The second issue that needs to be handled
is monitoring. What is needed is a unified approach to allow users to see how
well their programs are behaving within a specific slice.
PlanetLab follows a simple
approach. Every node is equipped with a collection of sensors, each sensor
being capable of reporting information such as CPU usage, disk activity, and so
on. Sensors can be arbitrarily complex, but the important issue is that they
always report information on a per-node basis. This information is made
available by means of a Web server: every sensor is accessible through simple
HTTP requests (Bavier et al., 2004).
Admittedly, this approach to
monitoring is still rather primitive, but it should be seen as a basis for
advanced monitoring schemes. For example, there is, in principle, no reason why
Astrolabe, which we discussed in Chap. 2, cannot be used for aggregated sensor
readings across multiple nodes.
Finally, to come to our
third management issue, namely the protection of programs against each other,
PlanetLab uses Linux virtual servers (called vservers) to isolate slices. As
mentioned, the main idea of a vserver is to run applications in there own
environment, which includes all files that are normally shared across a single
machine. Such a separation can be achieved relatively easy by means of the UNIX
chroot command, which effectively changes the root of the file system from
where applications will look for files. Only the superuser can execute chroot.
[Page 103]
Of course, more is needed.
Linux virtual servers not only separate the file system, but also normally
shared information on processes, network addresses, memory usage, and so on. As
a consequence, a physical machine is actually partitioned into multiple units,
each unit corresponding to a full-fledged Linux environment, isolated from the
other parts. An overview of Linux virtual servers can be found in Potzl et al.
(2005).
3.5. Code Migration
So far, we have been mainly
concerned with distributed systems in which communication is limited to passing
data. However, there are situations in which passing programs, sometimes even
while they are being executed, simplifies the design of a distributed system.
In this section, we take a detailed look at what code migration actually is. We
start by considering different approaches to code migration, followed by a
discussion on how to deal with the local resources that a migrating program
uses. A particularly hard problem is migrating code in heterogeneous systems,
which is also discussed.
3.5.1. Approaches to Code
Migration
Before taking a look at the
different forms of code migration, let us first consider why it may be useful
to migrate code.
Reasons for Migrating Code
Traditionally, code
migration in distributed systems took place in the form of process migration in
which an entire process was moved from one machine to another (Milojicic et
al., 2000). Moving a running process to a different machine is a costly and
intricate task, and there had better be a good reason for doing so. That reason
has always been performance. The basic idea is that overall system performance
can be improved if processes are moved from heavily-loaded to lightly-loaded
machines. Load is often expressed in terms of the CPU queue length or CPU
utilization, but other performance indicators are used as well.
Load distribution algorithms
by which decisions are made concerning the allocation and redistribution of
tasks with respect to a set of processors, play an important role in
compute-intensive systems. However, in many modern distributed systems,
optimizing computing capacity is less an issue than, for example, trying to
minimize communication. Moreover, due to the heterogeneity of the underlying
platforms and computer networks, performance improvement through code migration
is often based on qualitative reasoning instead of mathematical models.
Consider, as an example, a
client-server system in which the server manages a huge database. If a client
application needs to perform many database operations involving large
quantities of data, it may be better to ship part of the client application to
the server and send only the results across the network. Otherwise, the network
may be swamped with the transfer of data from the server to the client. In this
case, code migration is based on the assumption that it generally makes sense
to process data close to where those data reside.
[Page 104]
This same reason can be used
for migrating parts of the server to the client. For example, in many
interactivedatabase applications,clients need to fill in forms that are subsequently
translated into a series of database operations. Processing the form at the
client side, and sending only the completed form to the server, can sometimes
avoid that a relatively large number of small messages need to cross the
network. The result is that the client perceives better performance, while at
the same time the server spends less time on form processing and communication.
Support for code migration
can also help improve performance by exploiting parallelism, but without the usual
intricacies related to parallel programming. A typical example is searching for
information in the Web. It is relatively simple to implement a search query in
the form of a small mobile program, called a mobile agent, that moves from site
to site. By making several copies of such a program, and sending each off to
different sites, we may be able to achieve a linear speedup compared to using
just a single program instance.
Besides improving
performance, there are other reasons for supporting code migration as well. The
most important one is that of flexibility. The traditional approach to building
distributed applications is to partition the application into different parts,
and decide in advance where each part should be executed. This approach, for example,
has led to the different multitiered client-server applications discussed in
Chap. 2.
However, if code can move
between different machines, it becomes possible to dynamically configure
distributed systems. For example, suppose a server implements a standardized
interface to a file system. To allow remote clients to access the file system,
the server makes use of a proprietary protocol. Normally, the client-side
implementation of the file system interface, which is based on that protocol,
would need to be linked with the client application. This approach requires
that the software be readily available to the client at the time the client
application is being developed.
An alternative is to let the
server provide the client's implementation no sooner than is strictly
necessary, that is, when the client binds to the server. At that point, the
client dynamically downloads the implementation, goes through the necessary
initialization steps, and subsequently invokes the server. This principle is
shown in Fig. 3-17. This model of dynamically moving code from a remote site
does require that the protocol for downloading and initializing code is
standardized. Also, it is necessary that the downloaded code can be executed on
the client's machine. Different solutions are discussed below and in later
chapters.
Figure 3-17. The principle
of dynamically configuring a client to communicate to a server. The client
first fetches the necessary software, and then invokes the server.
(This item is displayed on
page 105 in the print version)
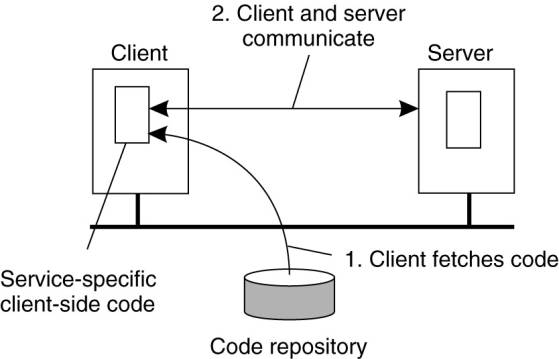
The important advantage of
this model of dynamically downloading clientside software is that clients need
not have all the software preinstalled to talk to servers. Instead, the
software can be moved in as necessary, and likewise, discarded when no longer
needed. Another advantage is that as long as interfaces are standardized, we
can change the client-server protocol and its implementation as often as we
like. Changes will not affect existing client applications that rely on the
server. There are, of course, also disadvantages. The most serious one, which
we discuss in Chap. 9, has to do with security. Blindly trusting that the
downloaded code implements only the advertised interface while accessing your
unprotected hard disk and does not send the juiciest parts to heaven-knows-who
may not always be such a good idea.
[Page 105]
Models for Code Migration
Although code migration
suggests that we move only code between machines, the term actually covers a
much richer area. Traditionally, communication in distributed systems is
concerned with exchanging data between processes. Code migration in the
broadest sense deals with moving programs between machines, with the intention
to have those programs be executed at the target. In some cases, as in process
migration, the execution status of a program, pending signals, and other parts
of the environment must be moved as well.
To get a better
understanding of the different models for code migration, we use a framework
described in Fuggetta et al. (1998). In this framework, a process consists of
three segments. The code segment is the part that contains the set of
instructions that make up the program that is being executed. The resource
segment contains references to external resources needed by the process, such
as files, printers, devices, other processes, and so on. Finally, an execution
segment is used to store the current execution state of a process, consisting
of private data, the stack, and, of course, the program counter.
[Page 106]
The bare minimum for code
migration is to provide only weak mobility. In this model, it is possible to
transfer only the code segment, along with perhaps some initialization data. A
characteristic feature of weak mobility is that a transferred program is always
started from one of several predefined starting positions. This is what
happens, for example, with Java applets, which always start execution from the
beginning. The benefit of this approach is its simplicity. Weak mobility
requires only that the target machine can execute that code, which essentially
boils down to making the code portable. We return to these matters when
discussing migration in heterogeneous systems.
In contrast to weak
mobility, in systems that support strong mobility the execution segment can be
transferred as well. The characteristic feature of strong mobility is that a
running process can be stopped, subsequently moved to another machine, and then
resume execution where it left off. Clearly, strong mobility is much more general
than weak mobility, but also much harder to implement.
Irrespective of whether
mobility is weak or strong, a further distinction can be made between
sender-initiated and receiver-initiated migration. In senderinitiated migration,
migration is initiated at the machine where the code currently resides or is
being executed. Typically, sender-initiated migration is done when uploading
programs to a compute server. Another example is sending a search program
across the Internet to a Web database server to perform the queries at that
server. In receiver-initiated migration, the initiative for code migration is
taken by the target machine. Java applets are an example of this approach.
Receiver-initiated migration
is simpler than sender-initiated migration. In many cases, code migration
occurs between a client and a server, where the client takes the initiative for
migration. Securely uploading code to a server, as is done in sender-initiated
migration, often requires that the client has previously been registered and
authenticated at that server. In other words, the server is required to know
all its clients, the reason being is that the client will presumably want
access to the server's resources such as its disk. Protecting such resources is
essential. In contrast, downloading code as in the receiver-initiated case, can
often be done anonymously. Moreover, the server is generally not interested in
the client's resources. Instead, code migration to the client is done only for
improving clientside performance. To that end, only a limited number of
resources need to be protected, such as memory and network connections. We
return to secure code migration extensively in Chap. 9.
In the case of weak
mobility, it also makes a difference if the migrated code is executed by the
target process, or whether a separate process is started. For example, Java
applets are simply downloaded by a Web browser and are executed in the
browser's address space. The benefit of this approach is that there is no need
to start a separate process, thereby avoiding communication at the target
machine. The main drawback is that the target process needs to be protected
against malicious or inadvertent code executions. A simple solution is to let
the operating system take care of that by creating a separate process to
execute the migrated code. Note that this solution does not solve the
resource-access problems mentioned above. They still have to be dealt with.
[Page 107]
Instead of moving a running
process, also referred to as process migration, strong mobility can also be
supported by remote cloning. In contrast to process migration, cloning yields
an exact copy of the original process, but now running on a different machine.
The cloned process is executed in parallel to the original process. In UNIX
systems, remote cloning takes place by forking off a child process and letting
that child continue on a remote machine. The benefit of cloning is that the
model closely resembles the one that is already used in many applications. The
only difference is that the cloned process is executed on a different machine.
In this sense, migration by cloning is a simple way to improve distribution
transparency.
The various alternatives for
code migration are summarized in Fig. 3-18.
Figure 3-18. Alternatives
for code migration.
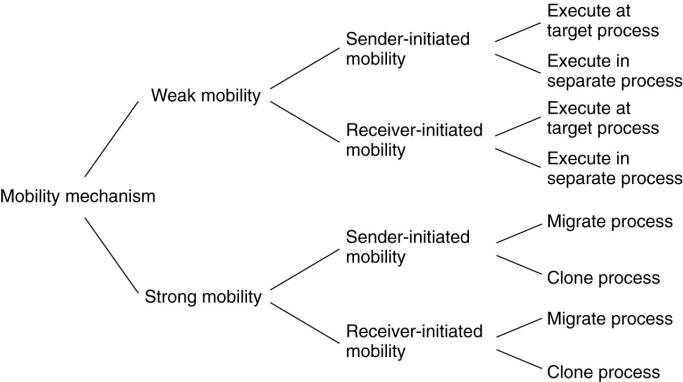
3.5.2. Migration and
Local Resources
So far, only the migration
of the code and execution segment has been taken into account. The resource
segment requires some special attention. What often makes code migration so
difficult is that the resource segment cannot always be simply transferred
along with the other segments without being changed. For example, suppose a
process holds a reference to a specific TCP port through which it was
communicating with other (remote) processes. Such a reference is held in its
resource segment. When the process moves to another location, it will have to
give up the port and request a new one at the destination. In other cases,
transferring a reference need not be a problem. For example, a reference to a
file by means of an absolute URL will remain valid irrespective of the machine
where the process that holds the URL resides.
[Page 108]
To understand the
implications that code migration has on the resource segment, Fuggetta et al.
(1998) distinguish three types of process-to-resource bindings. The strongest
binding is when a process refers to a resource by its identifier. In that case,
the process requires precisely the referenced resource, and nothing else. An
example of such a binding by identifier is when a process uses a URL to refer
to a specific Web site or when it refers to an FTP server by means of that
server's Internet address. In the same line of reasoning, references to local
communication end points also lead to a binding by identifier.
A weaker form of
process-to-resource binding is when only the value of a resource is needed. In
that case, the execution of the process would not be affected if another
resource would provide that same value. A typical example of binding by value
is when a program relies on standard libraries, such as those for programming
in C or Java. Such libraries should always be locally available, but their
exact location in the local file system may differ between sites. Not the
specific files, but their content is important for the proper execution of the
process.
Finally, the weakest form of
binding is when a process indicates it needs only a resource of a specific
type. This binding by type is exemplified byreferences to local devices, such
as monitors, printers, and so on.
When migrating code, we
often need to change the references to resources, but cannot affect the kind of
process-to-resource binding. If, and exactly how a reference should be changed,
depends on whether that resource can be moved along with the code to the target
machine. More specifically, we need to consider the resource-to-machine
bindings, and distinguish the following cases. Unattached resources can be
easily moved between different machines, and are typically (data) files
associated only with the program that is to be migrated. In contrast, moving or
copying a fastened resource may be possible, but only at relatively high costs.
Typical examples of fastened resources are local databases and complete Web
sites. Although such resources are, in theory, not dependent on their current
machine, it is often infeasible to move them to another environment. Finally,
fixed resources are intimately bound to a specific machine or environment and
cannot be moved. Fixed resources are often local devices. Another example of a
fixed resource is a local communication end point.
Combining three types of
process-to-resource bindings, and three types of resource-to-machine bindings, leads
to nine combinations that we need to consider when migrating code. These nine
combinations are shown in Fig. 3-19.
Figure 3-19. Actions to be
taken with respect to the references to local resources when migrating code to
another machine.
(This item is displayed on
page 109 in the print version)
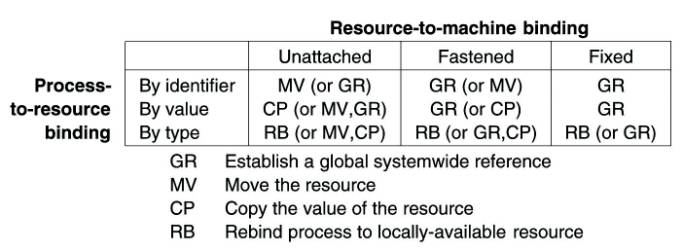
Let us first consider the
possibilities when a process is bound to a resource by identifier. When the
resource is unattached, it is generally best to move it along with the
migrating code. However, when the resource is shared by other processes, an
alternative is to establish a global reference, that is, a reference that can
cross machine boundaries. An example of such a reference is a URL. When the
resource is fastened or fixed, the best solution is also to create a global
reference.
[Page 109]
It is important to realize
that establishing a global reference may be more than just making use of URLs,
and that the use of such a reference is sometimes prohibitively expensive.
Consider, for example, a program that generates high-quality images for a
dedicated multimedia workstation. Fabricating high-quality images in real time
is a compute-intensive task, for which reason the program may be moved to a
high-performance compute server. Establishing a global reference to the
multimedia workstation means setting up a communication path between the
compute server and the workstation. In addition, there is significant
processing involved at both the server and the workstation to meet the
bandwidth requirements of transferring the images. The net result may be that
moving the program to the compute server is not such a good idea, only because
the cost of the global reference is too high.
Another example of where
establishing a global reference is not always that easy is when migrating a
process that is making use of a local communication end point. In that case, we
are dealing with a fixed resource to which the process is bound by the
identifier. There are basically two solutions. One solution is to let the
process set up a connection to the source machine after it has migrated and
install a separate process at the source machine that simply forwards all
incoming messages. The main drawback of this approach is that whenever the
source machine malfunctions, communication with the migrated process may fail.
The alternative solution is to have all processes that communicated with the
migrating process, change their global reference, and send messages to the new
communication end point at the target machine.
The situation is different
when dealing with bindings by value. Consider first a fixed resource. The
combination of a fixed resource and binding by value occurs, for example, when
a process assumes that memory can be shared between processes. Establishing a
global reference in this case would mean that we need to implement a
distributed form of shared memory. In many cases, this is not really a viable
or efficient solution.
[Page 110]
Fastened resources that are
referred to by their value, are typically runtime libraries. Normally, copies
of such resources are readily available on the target machine, or should
otherwise be copied before code migration takes place. Establishing a global
reference is a better alternative when huge amounts of data are to be copied,
as may be the case with dictionaries and thesauruses in text processing
systems.
The easiest case is when
dealing with unattached resources. The best solution is to copy (or move) the
resource to the new destination, unless it is shared by a number of processes.
In the latter case, establishing a global reference is the only option.
The last case deals with
bindings by type. Irrespective of the resource-to-machine binding, the obvious
solution is to rebind the process to a locally available resource of the same type.
Only when such a resource is not available, will we need to copy or move the
original one to the new destination, or establish a global reference.
3.5.3. Migration in
Heterogeneous Systems
So far, we have tacitly
assumed that the migrated code can be easily executed at the target machine.
This assumption is in order when dealing with homogeneous systems. In general,
however, distributed systems are constructed on a heterogeneous collection of
platforms, each having their own operating system and machine architecture.
Migration in such systems requires that each platform is supported, that is,
that the code segment can be executed on each platform. Also, we need to ensure
that the execution segment can be properly represented at each platform.
The problems coming from
heterogeneity are in many respects the same as those of portability. Not
surprisingly, solutions are also very similar. For example, at the end of the
1970s, a simple solution to alleviate many of the problems of porting Pascal to
different machines was to generate machine-independent intermediate code for an
abstract virtual machine (Barron, 1981). That machine, of course, would need to
be implemented on many platforms, but it would then allow Pascal programs to be
run anywhere. Although this simple idea was widely used for some years, it
never really caught on as the general solution to portability problems for
other languages, notably C.
About 25 years later, code migration
in heterogeneous systems is being attacked by scripting languages and highly
portable languages such as Java. In essence, these solutions adopt the same
approach as was done for porting Pascal. All such solutions have in common that
they rely on a (process) virtual machine that either directly interprets source
code (as in the case of scripting languages), or otherwise interprets
intermediate code generated by a compiler (as in Java). Being in the right
place at the right time is also important for language developers.
[Page 111]
Recent developments have
started to weaken the dependency on programming languages. In particular,
solutions have been proposed not only to migrate processes, but to migrate
entire computing environments. The basic idea is to compartmentalize the
overall environment and to provide processes in the same part their own view on
their computing environment.
If the compartmentalization
is done properly, it becomes possible to decouple a part from the underlying
system and actually migrate it to another machine. In this way, migration would
actually provide a form of strong mobility for processes, as they can then be
moved at any point during their execution, and continue where they left off
when migration completes. Moreover, many of the intricacies related to
migrating processes while they have bindings to local resources may be solved,
as these bindings are in many cases simply preserved. The local resources,
namely, are often part of the environment that is being migrated.
There are several reasons
for wanting to migrate entire environments, but perhaps the most important one
is that it allows continuation of operation while a machine needs to be
shutdown. For example, in a server cluster, the systems administrator may decide
to shut down or replace a machine, but will not have to stop all its running
processes. Instead, it can temporarily freeze an environment, move it to
another machine (where it sits next to other, existing environments), and
simply unfreeze it again. Clearly, this is an extremely powerful way to manage
long-running compute environments and their processes.
Let us consider one specific
example of migrating virtual machines, as discussed in Clark et al. (2005). In
this case, the authors concentrated on real-time migration of a virtualized
operating system, typically something that would be convenient in a cluster of
servers where a tight coupling is achieved through a single, shared local-area
network. Under these circumstances, migration involves two major problems:
migrating the entire memory image and migrating bindings to local resources.
As to the first problem,
there are, in principle, three ways to handle migration (which can be
combined):
- Pushing memory pages to the new machine and
resending the ones that are later modified during the migration process.
- Stopping the current virtual machine; migrate
memory, and start the new virtual machine.
- Letting the new virtual machine pull in new
pages as needed, that is, let processes start on the new virtual machine
immediately and copy memory pages on demand.
The second option may lead
to unacceptable downtime if the migrating virtual machine is running a live
service, that is, one that offers continuous service. On the other hand, a pure
on-demand approach as represented by the third option may extensively prolong
the migration period, but may also lead to poor performance because it takes a
long time before the working set of the migrated processes has been moved to
the new machine.
[Page 112]
As an alternative, Clark et
al. (2005) propose to use a pre-copy approach which combines the first option,
along with a brief stop-and-copy phase as represented by the second option. As
it turns out, this combination can lead to service downtimes of 200 ms or less.
Concerning local resources,
matters are simplified when dealing only with a cluster server. First, because
there is a single network, the only thing that needs to be done is to announce
the new network-to-MAC address binding, so that clients can contact the migrated
processes at the correct network interface. Finally, if it can be assumed that
storage is provided as a separate tier (like we showed in Fig. 3-12), then
migrating binding to files is similarly simple.
The overall effect is that,
instead of migrating processes, we now actually see that an entire operating
system can be moved between machines.