|
CS 610 - Introduction to Parallel and Distributed Computing |
Lecture 1: Overview
(Lecture
adapted from Blaise Barney, Lawrence Livermore
National Laboratory (See https://computing.llnl.gov/tutorials/parallel_comp/
)
What
is Parallel Computing?
- Traditionally, software
has been written for serial computation:
- To be run on a single
computer having a single Central Processing Unit (CPU);
- A problem is broken
into a discrete series of instructions.
- Instructions are
executed one after another.
- Only one instruction
may execute at any moment in time.
For example:
- In the simplest sense, parallel
computing is the simultaneous use of multiple compute resources to
solve a computational problem:
- To be run using
multiple CPUs
- A problem is broken
into discrete parts that can be solved concurrently
- Each part is further
broken down to a series of instructions
- Instructions from each
part execute simultaneously on different CPUs
For example:
- The compute resources
might be:
- A single computer with
multiple processors;
- An arbitrary number of
computers connected by a network;
- A combination of both.
- The computational
problem should be able to:
- Be broken apart into
discrete pieces of work that can be solved simultaneously;
- Execute multiple
program instructions at any moment in time;
- Be solved in less time
with multiple compute resources than with a single compute resource.
![]() The
Universe is Parallel:
The
Universe is Parallel:
- Parallel computing is an
evolution of serial computing that attempts to emulate what has always
been the state of affairs in the natural world: many complex, interrelated
events happening at the same time, yet within a temporal sequence. For
example:
|
The Real World is Massively
Parallel |
|
|

![]() Uses
for Parallel Computing:
Uses
for Parallel Computing:
- Science and Engineering:
Historically,
parallel computing has been considered to be "the high end of computing",
and has been used to model difficult problems in many areas of science and
engineering:
|
o
Atmosphere,
Earth, Environment o
Physics
- applied, nuclear, particle, condensed matter, high pressure, fusion,
photonics o
Bioscience,
Biotechnology, Genetics o
Chemistry,
Molecular Sciences |
o
Geology,
Seismology o
Mechanical
Engineering - from prosthetics to spacecraft o
Electrical
Engineering, Circuit Design, Microelectronics o
Computer
Science, Mathematics |
- Industrial and
Commercial:
Today, commercial applications provide an equal or greater driving force
in the development of faster computers. These applications require the
processing of large amounts of data in sophisticated ways. For example:
|
o
Databases,
data mining o
Oil
exploration o
Web
search engines, web based business services o
Medical
imaging and diagnosis o
Pharmaceutical
design |
o
Financial
and economic modeling o
Management
of national and multi-national corporations o
Advanced
graphics and virtual reality, particularly in the entertainment industry o
Networked
video and multi-media technologies o
Collaborative
work environments |
Why Use Parallel
Computing?
|
![]() Main Reasons:
Main Reasons:
|
|
|
|
|
|
|
|
|
|



![]() Who
and What?
Who
and What?
- Top500.org provides statistics
on parallel computing - the charts below are just a sampling.
![]() The
Future:
The
Future:
- During the past 20+
years, the trends indicated by ever faster networks, distributed systems,
and multi-processor computer architectures (even at the desktop level)
clearly show that parallelism is the future of computing.
- In this same time
period, there has been a greater than 1000x increase in supercomputer
performance, with no end currently in sight.
- The race is already on
for Exascale Computing!
|
|
|
|
Concepts and Terminology |
von Neumann Architecture
- Named after the
Hungarian mathematician John von Neumann who first authored the general
requirements for an electronic computer in his 1945 papers.
- Since then, virtually
all computers have followed this basic design, differing from earlier
computers which were programmed through "hard wiring".
|
|
o
Comprised
of four main components: § Memory § Control Unit § Arithmetic Logic Unit § Input/Output o
Read/write,
random access memory is used to store both program instructions and data § Program instructions are
coded data which tell the computer to do something § Data is simply information
to be used by the program o
Control
unit fetches instructions/data from memory, decodes the instructions and then
sequentially coordinates operations to accomplish the
programmed task. o
Aritmetic Unit performs basic arithmetic operations o
Input/Output is the interface to the human operator |
- So what? Who cares? Well,
parallel computers still follow this basic design, just multiplied in
units. The basic, fundamental architecture remains the same.
Flynn's Classical
Taxonomy
- There are different ways
to classify parallel computers. One of the more widely used
classifications, in use since 1966, is called Flynn's Taxonomy.
- Flynn's taxonomy
distinguishes multi-processor computer architectures according to how they
can be classified along the two independent dimensions of Instruction
and Data. Each of these dimensions can have only one of two
possible states: Single or Multiple.
- The matrix below defines
the 4 possible classifications according to Flynn:
S I S D
Single Instruction, Single Data |
S I M D
Single Instruction, Multiple Data |
M I S D
Multiple Instruction, Single Data |
M I M D
Multiple Instruction, Multiple Data |
|
|
|
|
|
|
|
|
|
|
|






|
|
|
|
|
|
|


|
|
|
|
|


|
|
|
|
|
|
|
|
|
|



|
|
|
|



Some General
Parallel Terminology
Like
everything else, parallel computing has its own "jargon". Some of the
more commonly used terms associated with parallel computing are listed below. Most
of these will be discussed in more detail later.
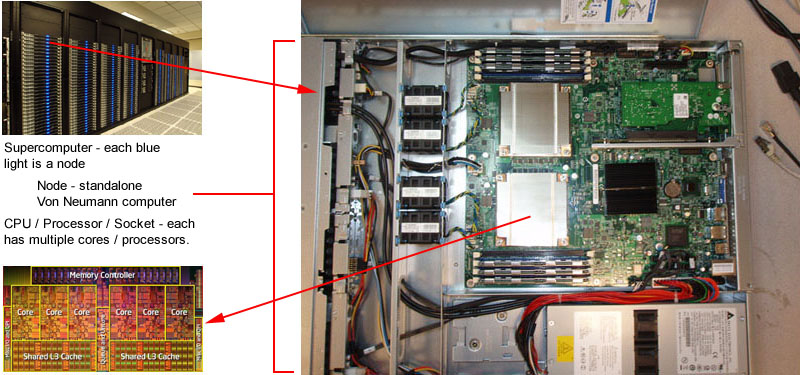
Supercomputing
/ High Performance Computing (HPC)
Using the world's fastest and
largest computers to solve large problems.
Node
A standalone "computer
in a box".
Usually comprised of multiple CPUs/processors/cores.
Nodes are networked together to comprise a supercomputer.
CPU
/ Socket / Processor / Core
This varies, depending upon who you talk to. In the past, a
CPU (Central Processing Unit) was a singular execution component for a
computer. Then, multiple CPUs were incorporated into a node. Then,
individual CPUs were subdivided into multiple "cores", each being a
unique execution unit. CPUs with multiple cores are sometimes called
"sockets" - vendor dependent. The result is a node with multiple CPUs,
each containing multiple cores. The nomenclature is confused at times. Wonder
why?
Task
A logically discrete section
of computational work.
A task is typically a program or program-like set of instructions that is
executed by a processor. A parallel program consists of multiple tasks running
on multiple processors.
Pipelining
Breaking a task into steps performed by different processor
units, with inputs streaming through, much like an assembly line; a type of
parallel computing.
Shared
Memory
From a strictly hardware point of view, describes a computer
architecture where all processors have direct (usually bus based) access to
common physical memory. In a programming sense, it describes a model where
parallel tasks all have the same "picture" of memory and can directly
address and access the same logical memory locations regardless of where the
physical memory actually exists.
Symmetric
Multi-Processor (SMP)
Hardware architecture where
multiple processors share a single address space and access to all resources;
shared memory computing.
Distributed
Memory
In hardware, refers to network based memory access for
physical memory that is not common. As a programming model, tasks can only
logically "see" local machine memory and must use communications to
access memory on other machines where other tasks are executing.
Communications
Parallel tasks typically need to exchange data. There are
several ways this can be accomplished, such as through a shared memory bus or
over a network, however the actual event of data exchange is commonly referred
to as communications regardless of the method employed.
Synchronization
The coordination of parallel tasks in real time, very often
associated with communications. Often implemented by establishing a
synchronization point within an application where a task may not proceed
further until another task(s) reaches the same or logically equivalent point.
Synchronization usually involves
waiting by at least one task, and can therefore cause a parallel application's
wall clock execution time to increase.
Granularity
In parallel computing, granularity is a qualitative measure
of the ratio of computation to communication.
·
Coarse:
relatively
large amounts of computational work are done between communication events
·
Fine: relatively small amounts of
computational work are done between communication events
Observed
Speedup
Observed speedup of a code which has been parallelized,
defined as:
|
wall-clock time of serial execution ----------------------------------- wall-clock time of parallel execution |
One of the
simplest and most widely used indicators for a parallel program's performance.
Parallel
Overhead
The amount of time required to coordinate parallel tasks, as
opposed to doing useful work. Parallel overhead can include factors such as:
·
Task
start-up time
·
Synchronizations
·
Data
communications
·
Software
overhead imposed by parallel compilers, libraries, tools, operating system,
etc.
·
Task
termination time
Massively
Parallel
Refers to the hardware that
comprises a given parallel system - having many processors. The meaning of
"many" keeps increasing, but currently, the largest parallel
computers can be comprised of processors numbering in the hundreds of
thousands.
Embarrassingly
Parallel
Solving many similar, but
independent tasks simultaneously; little to no need for coordination between
the tasks.
Scalability
Refers to a parallel system's
(hardware and/or software) ability to demonstrate a proportionate increase in
parallel speedup with the addition of more processors. Factors that contribute to
scalability include:
·
Hardware
- particularly memory-cpu bandwidths and network
communications
·
Application
algorithm
·
Parallel
overhead related
·
Characteristics
of your specific application and coding
|
Parallel Computer Memory Architectures |
Shared Memory
![]() General Characteristics:
General Characteristics:
|
|
![]() Advantages:
Advantages:
- Global address space
provides a user-friendly programming perspective to memory
- Data sharing between
tasks is both fast and uniform due to the proximity of memory to CPUs
![]() Disadvantages:
Disadvantages:
- Primary disadvantage is
the lack of scalability between memory and CPUs. Adding more CPUs can
geometrically increases traffic on the shared memory-CPU path, and for
cache coherent systems, geometrically increase traffic associated with
cache/memory management.
- Programmer
responsibility for synchronization constructs that ensure
"correct" access of global memory.
- Expense: it becomes
increasingly difficult and expensive to design and produce shared memory
machines with ever increasing numbers of processors.
Distributed Memory
![]() General Characteristics:
General Characteristics:
- Like shared memory
systems, distributed memory systems vary widely but share a common
characteristic. Distributed memory systems require a communication network
to connect inter-processor memory.
- Processors have their
own local memory. Memory addresses in one processor do not map to another
processor, so there is no concept of global address space across all
processors.
- Because each processor
has its own local memory, it operates independently. Changes it makes to
its local memory have no effect on the memory of other processors. Hence,
the concept of cache coherency does not apply.
- When a processor needs
access to data in another processor, it is usually the task of the
programmer to explicitly define how and when data is communicated.
Synchronization between tasks is likewise the programmer's responsibility.
- The network
"fabric" used for data transfer varies widely, though it can can be as simple as
Ethernet.
![]() Advantages:
Advantages:
- Memory is scalable with
the number of processors. Increase the number of processors and the size
of memory increases proportionately.
- Each processor can
rapidly access its own memory without interference and without the
overhead incurred with trying to maintain cache coherency.
- Cost effectiveness: can
use commodity, off-the-shelf processors and networking.
![]() Disadvantages:
Disadvantages:
- The programmer is
responsible for many of the details associated with data communication
between processors.
- It may be difficult to
map existing data structures, based on global memory, to this memory
organization.
- Non-uniform memory
access (NUMA) times
Hybrid
Distributed-Shared Memory
- The
largest and fastest computers in the world today employ both shared and
distributed memory architectures.
|
|
|
- The shared memory
component can be a cache coherent SMP machine and/or graphics processing
units (GPU).
- The distributed memory
component is the networking of multiple SMP/GPU machines, which know only
about their own memory - not the memory on another machine. Therefore,
network communications are required to move data from one SMP/GPU to
another.
- Current trends seem to
indicate that this type of memory architecture will continue to prevail
and increase at the high end of computing for the foreseeable future.
- Advantages and
Disadvantages: whatever is common to both shared and distributed memory architectures.
|
Parallel Programming Models |
Overview
- There are several
parallel programming models in common use:
- Shared Memory (without
threads)
- Threads
- Distributed Memory /
Message Passing
- Data Parallel
- Hybrid
- Single Program Multiple
Data (SPMD)
- Multiple Program
Multiple Data (MPMD)
- Parallel programming
models exist as an abstraction above hardware and memory architectures.
- Although it might not
seem apparent, these models are NOT specific to a particular type
of machine or memory architecture. In fact, any of these models can
(theoretically) be implemented on any underlying hardware. Two examples
from the past are discussed below.
|
o
SHARED
memory model on a DISTRIBUTED memory machine: Kendall Square Research (KSR)
ALLCACHE approach. Machine memory was physically
distributed across networked machines, but appeared to the user as a single
shared memory (global address space). Generically, this approach is referred
to as "virtual shared memory". |
|
|
o
DISTRIBUTED
memory model on a SHARED memory machine: Message Passing Interface (MPI) on
SGI Origin 2000. The SGI Origin 2000 employed the
CC-NUMA type of shared memory architecture, where every task has direct
access to global address space spread across all machines. However, the
ability to send and receive messages using MPI, as is commonly done over a
network of distributed memory machines, was implemented and commonly used. |
|


- Which model to use? This is often a
combination of what is available and personal choice. There is no
"best" model, although there certainly are better
implementations of some models over others.
- The following sections
describe each of the models mentioned above, and also discuss some of
their actual implementations.
Shared Memory Model
(without threads)
- In this programming
model, tasks share a common address space, which they read and write to
asynchronously.
- Various mechanisms such
as locks / semaphores may be used to control access to the shared memory.
- An advantage of this
model from the programmer's point of view is that the notion of data
"ownership" is lacking, so there is no need to specify
explicitly the communication of data between tasks. Program development
can often be simplified.
- An important
disadvantage in terms of performance is that it becomes more difficult to
understand and manage data locality.
- Keeping data local to
the processor that works on it conserves memory accesses, cache refreshes
and bus traffic that occurs when multiple
processors use the same data.
- Unfortunately,
controlling data locality is hard to understand and beyond the control of
the average user.
![]() Implementations:
Implementations:
- Native compilers and/or
hardware translate user program variables into actual memory addresses,
which are global. On stand-alone SMP machines, this is straightforward.
- On distributed shared
memory machines, such as the SGI Origin, memory is physically distributed
across a network of machines, but made global through specialized hardware
and software.
Threads Model
- This programming model
is a type of shared memory programming.
- In the threads model of
parallel programming, a single process can have multiple, concurrent
execution paths.
- Perhaps the most simple
analogy that can be used to describe threads is the concept of a single
program that includes a number of subroutines:
- The main program is scheduled to run by
the native operating system. loads and acquires all
of the necessary system and user resources to run.
- performs some serial
work, and then creates a number of tasks (threads) that can be scheduled
and run by the operating system concurrently.
- Each thread has local
data, but also, shares the entire resources of . This saves the
overhead associated with replicating a program's resources for each
thread. Each thread also benefits from a global memory view because it
shares the memory space of .
- A thread's work may
best be described as a subroutine within the main program. Any thread can
execute any subroutine at the same time as other threads.
- Threads communicate
with each other through global memory (updating address locations). This
requires synchronization constructs to ensure that more than one thread
is not updating the same global address at any time.
- Threads can come and
go, but remains present to provide the necessary shared
resources until the application has completed.
![]() Implementations:
Implementations:
- From a programming
perspective, threads implementations commonly comprise:
- A library of
subroutines that are called from within parallel source code
- A set of compiler
directives imbedded in either serial or parallel source code
In both cases, the programmer is
responsible for determining all parallelism.
- Threaded implementations
are not new in computing. Historically, hardware vendors have implemented
their own proprietary versions of threads. These implementations differed
substantially from each other making it difficult for programmers to
develop portable threaded applications.
- Unrelated
standardization efforts have resulted in two very different
implementations of threads: POSIX Threads and OpenMP.
- POSIX Threads
- Library based; requires
parallel coding
- Specified by the IEEE
POSIX 1003.1c standard (1995).
- C Language only
- Commonly referred to as
Pthreads.
- Most hardware vendors
now offer Pthreads in addition to their
proprietary threads implementations.
- Very explicit parallelism;
requires significant programmer attention to detail.
- OpenMP
- Compiler directive
based; can use serial code
- Jointly defined and
endorsed by a group of major computer hardware and software vendors. The OpenMP Fortran API was
released October 28, 1997. The C/C++ API was released in late 1998.
- Portable /
multi-platform, including Unix and Windows NT platforms
- Available in C/C++ and
Fortran implementations
- Can be very easy and
simple to use - provides for "incremental parallelism"
- Microsoft has its own
implementation for threads, which is not related to the UNIX POSIX
standard or OpenMP.
![]() More
Information:
More
Information:
- POSIX Threads tutorial: computing.llnl.gov/tutorials/pthreads
- OpenMP tutorial: computing.llnl.gov/tutorials/openMP
Distributed Memory
/ Message Passing Model
- This model demonstrates
the following characteristics:
- A set of tasks that use
their own local memory during computation. Multiple tasks can reside on
the same physical machine and/or across an arbitrary number of machines.
- Tasks exchange data
through communications by sending and receiving messages.
- Data transfer usually
requires cooperative operations to be performed by each process. For
example, a send operation must have a matching receive operation.
![]() Implementations:
Implementations:
- From a programming
perspective, message passing implementations usually comprise a library of
subroutines. Calls to these subroutines are imbedded in source code. The
programmer is responsible for determining all parallelism.
- Historically, a variety
of message passing libraries have been available since the 1980s. These
implementations differed substantially from each other making it difficult
for programmers to develop portable applications.
- In 1992, the MPI Forum
was formed with the primary goal of establishing a standard interface for
message passing implementations.
- Part 1 of the Message
Passing Interface (MPI) was released in 1994. Part 2 (MPI-2) was
released in 1996. Both MPI specifications are available on the web at http://www-unix.mcs.anl.gov/mpi/.
- MPI is now the "de
facto" industry standard for message passing, replacing virtually all
other message passing implementations used for production work. MPI
implementations exist for virtually all popular parallel computing
platforms. Not all implementations include everything in both MPI1 and
MPI2.
![]() More
Information:
More
Information:
- MPI tutorial: computing.llnl.gov/tutorials/mpi
Data Parallel Model
- The data parallel model
demonstrates the following characteristics:
- Most of the parallel
work focuses on performing operations on a data set. The data set is
typically organized into a common structure, such as an array or cube.
- A set of tasks work
collectively on the same data structure, however, each task works on a
different partition of the same data structure.
- Tasks perform the same
operation on their partition of work, for example, "add 4 to every
array element".
- On shared memory
architectures, all tasks may have access to the data structure through
global memory. On distributed memory architectures the data structure is
split up and resides as "chunks" in the local memory of each
task.
![]() Implementations:
Implementations:
- Programming with the
data parallel model is usually accomplished by writing a program with data
parallel constructs. The constructs can be calls to a data parallel
subroutine library or, compiler directives recognized by a data parallel
compiler.
- Fortran 90 and 95 (F90, F95): ISO/ANSI standard
extensions to Fortran 77.
- Contains everything
that is in Fortran 77
- New source code format;
additions to character set
- Additions to program
structure and commands
- Variable additions -
methods and arguments
- Pointers and dynamic
memory allocation added
- Array processing
(arrays treated as objects) added
- Recursive and new
intrinsic functions added
- Many other new features
Implementations are available for
most common parallel platforms.
- High Performance Fortran (HPF): Extensions to Fortran 90 to support data parallel
programming.
- Contains everything in
Fortran 90
- Directives to tell
compiler how to distribute data added
- Assertions that can
improve optimization of generated code added
- Data parallel
constructs added (now part of Fortran 95)
HPF compilers were relatively
common in the 1990s, but are no longer commonly implemented.
- Compiler Directives: Allow the programmer to
specify the distribution and alignment of data. Fortran
implementations are available for most common parallel platforms.
- Distributed memory
implementations of this model usually require the compiler to produce
object code with calls to a message passing library (MPI) for data
distribution. All message passing is done
invisibly to the programmer.
Hybrid Model
- A hybrid model combines
more than one of the previously described programming models.
- Currently, a common
example of a hybrid model is the combination of the message passing model
(MPI) with the threads model (OpenMP).
- Threads perform
computationally intensive kernels using local, on-node data
- Communications between
processes on different nodes occurs over the network using MPI
- This hybrid model lends
itself well to the increasingly common hardware environment of clustered
multi/many-core machines.
- Another similar and
increasingly popular example of a hybrid model is using MPI with GPU
(Graphics Processing Unit) programming.
- GPUs perform
computationally intensive kernels using local, on-node data
- Communications between
processes on different nodes occurs over the network using MPI
SPMD and MPMD
![]() Single Program Multiple Data
(SPMD):
Single Program Multiple Data
(SPMD):
- SPMD is actually a
"high level" programming model that can be built upon any
combination of the previously mentioned parallel programming models.
- SINGLE PROGRAM: All
tasks execute their copy of the same program simultaneously. This program
can be threads, message passing, data parallel or hybrid.
- MULTIPLE DATA: All tasks
may use different data
- SPMD programs usually
have the necessary logic programmed into them to allow different tasks to
branch or conditionally execute only those parts of the program they are
designed to execute. That is, tasks do not necessarily have to execute the
entire program - perhaps only a portion of it.
- The SPMD model, using
message passing or hybrid programming, is probably the most commonly used
parallel programming model for multi-node clusters.
![]() Multiple
Program Multiple Data (MPMD):
Multiple
Program Multiple Data (MPMD):
- Like SPMD, MPMD is
actually a "high level" programming model that can be built upon
any combination of the previously mentioned parallel programming models.
- MULTIPLE PROGRAM: Tasks may execute different programs simultaneously.
The programs can be threads, message passing, data parallel or hybrid.
- MULTIPLE DATA: All tasks
may use different data
- MPMD applications are
not as common as SPMD applications, but may be better suited for certain
types of problems, particularly those that lend themselves better to
functional decomposition than domain decomposition (discussed later under Partioning).
|
Designing Parallel Programs |
Automatic vs.
Manual Parallelization
- Designing and developing
parallel programs has characteristically been a very manual process. The
programmer is typically responsible for both identifying and actually
implementing parallelism.
- Very often, manually
developing parallel codes is a time consuming, complex, error-prone and iterative
process.
- For a number of years
now, various tools have been available to assist the programmer with
converting serial programs into parallel programs. The most common type of
tool used to automatically parallelize a serial program is a parallelizing
compiler or pre-processor.
- A parallelizing compiler
generally works in two different ways:
- Fully Automatic
- The compiler analyzes
the source code and identifies opportunities for parallelism.
- The analysis includes identifying
inhibitors to parallelism and possibly a cost weighting on whether or
not the parallelism would actually improve performance.
- Loops (do, for) loops
are the most frequent target for automatic parallelization.
- Programmer Directed
- Using "compiler
directives" or possibly compiler flags, the programmer explicitly
tells the compiler how to parallelize the code.
- May be able to be used
in conjunction with some degree of automatic parallelization also.
- If you are beginning
with an existing serial code and have time or budget constraints, then
automatic parallelization may be the answer. However, there are several
important caveats that apply to automatic parallelization:
- Wrong results may be
produced
- Performance may
actually degrade
- Much less flexible than
manual parallelization
- Limited to a subset
(mostly loops) of code
- May actually not
parallelize code if the analysis suggests there are inhibitors or the
code is too complex
- The remainder of this
section applies to the manual method of developing parallel codes.
Understand the
Problem and the Program
- Undoubtedly, the first
step in developing parallel software is to first understand the problem
that you wish to solve in parallel. If you are starting with a serial
program, this necessitates understanding the existing code also.
- Before spending time in
an attempt to develop a parallel solution for a problem, determine whether
or not the problem is one that can actually be parallelized.
- Example of
Parallelizable Problem:
|
Calculate
the potential energy for each of several thousand independent conformations
of a molecule. When done, find the minimum energy conformation. |
- This
problem is able to be solved in parallel. Each of the molecular
conformations is independently determinable. The calculation of the
minimum energy conformation is also a parallelizable problem.
- Example of a
Non-parallelizable Problem:
|
Calculation
of the Fibonacci series (0,1,1,2,3,5,8,13,21,...) by use of the formula: F(n) = F(n-1)
+ F(n-2) |
- This
is a non-parallelizable problem because the calculation of the Fibonacci
sequence as shown would entail dependent calculations rather than
independent ones. The calculation of the F(n)
value uses those of both F(n-1) and F(n-2). These three terms cannot be
calculated independently and therefore, not in parallel.
|
|
Partitioning
- One of the first steps
in designing a parallel program is to break the problem into discrete
"chunks" of work that can be distributed to multiple tasks. This
is known as decomposition or partitioning.
- There are two basic ways
to partition computational work among parallel tasks: domain
decomposition and functional decomposition.
![]() Domain
Decomposition:
Domain
Decomposition:
- In this type of
partitioning, the data associated with a problem is decomposed. Each
parallel task then works on a portion of of the
data.
![]() Functional
Decomposition:
Functional
Decomposition:
- In this approach, the
focus is on the computation that is to be performed rather than on the
data manipulated by the computation. The problem is decomposed according
to the work that must be done. Each task then performs a portion of the
overall work.
- Functional decomposition
lends itself well to problems that can be split into different tasks. For
example:
Ecosystem Modeling
Each program calculates the population of a given group, where each group's
growth depends on that of its neighbors. As time progresses, each process
calculates its current state, then exchanges information with the neighbor
populations. All tasks then progress to calculate the state at the next time
step.
Signal Processing
An audio signal data set is passed through four distinct computational filters.
Each filter is a separate process. The first segment of data must pass through
the first filter before progressing to the second. When it does, the second
segment of data passes through the first filter. By the time the fourth segment
of data is in the first filter, all four tasks are busy.
Climate Modeling
Each model component can be thought of as a separate task. Arrows represent
exchanges of data between components during computation: the atmosphere model
generates wind velocity data that are used by the ocean model, the ocean model
generates sea surface temperature data that are used by the atmosphere model,
and so on.
- Combining these two
types of problem decomposition is common and natural.
Communications
![]() Who Needs Communications?
Who Needs Communications?
The need for communications between
tasks depends upon your problem:
- You DON'T need
communications
- Some types of problems
can be decomposed and executed in parallel with virtually no need for
tasks to share data. For example, imagine an image processing operation
where every pixel in a black and white image needs to have its color
reversed. The image data can easily be distributed to multiple tasks that
then act independently of each other to do their portion of the work.
- These types of problems
are often called embarrassingly parallel because they are
so straight-forward. Very little inter-task communication is required.
- You DO need
communications
- Most parallel
applications are not quite so simple, and do require tasks to share data
with each other. For example, a 3-D heat diffusion problem requires a
task to know the temperatures calculated by the tasks that have
neighboring data. Changes to neighboring data has
a direct effect on that task's data.
![]() Factors
to Consider:
Factors
to Consider:
There are a number of important factors to consider when designing your program's inter-task communications:
- Cost of communications
- Inter-task
communication virtually always implies overhead.
- Machine cycles and
resources that could be used for computation are instead used to package
and transmit data.
- Communications
frequently require some type of synchronization between tasks, which can
result in tasks spending time "waiting" instead of doing work.
- Competing communication
traffic can saturate the available network bandwidth, further aggravating
performance problems.
- Latency vs. Bandwidth
- latency is the time it takes
to send a minimal (0 byte) message from point A to point B. Commonly
expressed as microseconds.
- bandwidth is the amount of data
that can be communicated per unit of time. Commonly expressed as
megabytes/sec or gigabytes/sec.
- Sending many small
messages can cause latency to dominate communication overheads. Often it
is more efficient to package small messages into a larger message, thus
increasing the effective communications bandwidth.
- Visibility of
communications
- With the Message
Passing Model, communications are explicit and generally quite visible
and under the control of the programmer.
- With the Data Parallel
Model, communications often occur transparently to the programmer,
particularly on distributed memory architectures. The programmer may not
even be able to know exactly how inter-task communications are being
accomplished.
- Synchronous vs.
asynchronous communications
- Synchronous
communications require some type of "handshaking" between tasks
that are sharing data. This can be explicitly structured in code by the
programmer, or it may happen at a lower level unknown to the programmer.
- Synchronous
communications are often referred to as blocking
communications since other work must wait until the communications have
completed.
- Asynchronous
communications allow tasks to transfer data independently from one
another. For example, task 1 can prepare and send a message to task 2,
and then immediately begin doing other work. When task 2 actually
receives the data doesn't matter.
- Asynchronous
communications are often referred to as non-blocking
communications since other work can be done while the communications are
taking place.
- Interleaving
computation with communication is the single greatest benefit for using
asynchronous communications.
- Scope of communications
- Knowing which tasks
must communicate with each other is critical during the design stage of a
parallel code. Both of the two scopings
described below can be implemented synchronously or asynchronously.
- Point-to-point - involves two tasks
with one task acting as the sender/producer of data, and the other acting
as the receiver/consumer.
- Collective - involves data
sharing between more than two tasks, which are often specified as being
members in a common group, or collective. Some common variations (there
are more):
- Efficiency of
communications
- Very often, the
programmer will have a choice with regard to factors that can affect
communications performance. Only a few are mentioned here.
- Which implementation
for a given model should be used? Using the Message Passing Model as an
example, one MPI implementation may be faster on a given hardware
platform than another.
- What type of
communication operations should be used? As mentioned previously,
asynchronous communication operations can improve overall program
performance.
- Network media - some
platforms may offer more than one network for communications. Which one
is best?
- Overhead and Complexity
- Finally, realize that
this is only a partial list of things to consider!!!
Synchronization
![]() Types of Synchronization:
Types of Synchronization:
- Barrier
- Usually implies that
all tasks are involved
- Each task performs its
work until it reaches the barrier. It then stops, or "blocks".
- When the last task
reaches the barrier, all tasks are synchronized.
- What happens from here
varies. Often, a serial section of work must be done. In other cases, the
tasks are automatically released to continue their work.
- Lock / semaphore
- Can involve any number
of tasks
- Typically used to
serialize (protect) access to global data or a section of code. Only one
task at a time may use (own) the lock / semaphore / flag.
- The first task to
acquire the lock "sets" it. This task can then safely
(serially) access the protected data or code.
- Other tasks can attempt
to acquire the lock but must wait until the task that owns the lock
releases it.
- Can be blocking or
non-blocking
- Synchronous
communication operations
- Involves only those
tasks executing a communication operation
- When a task performs a
communication operation, some form of coordination is required with the
other task(s) participating in the communication. For example, before a
task can perform a send operation, it must first receive an
acknowledgment from the receiving task that it is OK to send.
- Discussed previously in
the Communications section.
Data Dependencies
![]() Definition:
Definition:
- A dependence exists between program
statements when the order of statement execution affects the results of
the program.
- A data dependence
results from multiple use of the same location(s) in storage by different
tasks.
- Dependencies are
important to parallel programming because they are one of the primary
inhibitors to parallelism.
![]() Examples:
Examples:
- Loop carried data
dependence
|
DO 500 J = MYSTART,MYEND
A(J) = A(J-1) * 2.0 500 CONTINUE |
The value of A(J-1)
must be computed before the value of A(J), therefore A(J) exhibits a data
dependency on A(J-1). Parallelism is inhibited.
If Task 2 has A(J) and task 1 has A(J-1), computing the correct value of A(J) necessitates:
- Distributed memory architecture
- task 2 must obtain the value of A(J-1) from task 1 after task 1
finishes its computation
- Shared memory
architecture - task 2 must read A(J-1) after task 1 updates it
- Loop independent data
dependence
|
task 1 task 2 ------ ------ X = 2 X = 4
. .
. . Y = X**2 Y = X**3 |
As with the previous example,
parallelism is inhibited. The value of Y is dependent on:
- Distributed memory
architecture - if or when the value of X is communicated between the
tasks.
- Shared memory
architecture - which task last stores the value of X.
- Although all data
dependencies are important to identify when designing parallel programs,
loop carried dependencies are particularly important since loops are
possibly the most common target of parallelization efforts.
![]() How
to Handle Data Dependencies:
How
to Handle Data Dependencies:
- Distributed memory
architectures - communicate required data at synchronization points.
- Shared memory
architectures -synchronize read/write operations between tasks.
Load Balancing
- Load balancing refers to
the practice of distributing work among tasks so that all
tasks are kept busy all of the time. It can be considered a
minimization of task idle time.
- Load balancing is
important to parallel programs for performance reasons. For example, if
all tasks are subject to a barrier synchronization point, the slowest task
will determine the overall performance.
![]() How to Achieve Load Balance:
How to Achieve Load Balance:
- Equally partition the
work each task receives
- For array/matrix
operations where each task performs similar work, evenly distribute the
data set among the tasks.
- For loop iterations
where the work done in each iteration is similar, evenly distribute the
iterations across the tasks.
- If a
heterogeneous mix of machines with varying performance characteristics
are being used, be sure to use some type of performance analysis
tool to detect any load imbalances. Adjust work accordingly.
- Use dynamic work
assignment
- Certain classes of
problems result in load imbalances even if data is evenly distributed
among tasks:
- Sparse arrays - some
tasks will have actual data to work on while others have mostly
"zeros".
- Adaptive grid methods
- some tasks may need to refine their mesh while others don't.
- N-body simulations -
where some particles may migrate to/from their original task domain to
another task's; where the particles owned by some tasks require more
work than those owned by other tasks.
- When the amount of work
each task will perform is intentionally variable, or is unable to be
predicted, it may be helpful to use a scheduler - task pool
approach. As each task finishes its work, it queues to get a new piece of
work.
- It may become necessary
to design an algorithm which detects and handles load imbalances as they
occur dynamically within the code.
Granularity
![]() Computation / Communication
Ratio:
Computation / Communication
Ratio:
- In parallel computing,
granularity is a qualitative measure of the ratio of computation to
communication.
- Periods of computation
are typically separated from periods of communication by synchronization
events.
|
|
|
I/O
![]() The Bad News:
The Bad News:
- I/O operations are
generally regarded as inhibitors to parallelism
- Parallel I/O systems may
be immature or not available for all platforms
- In an environment where
all tasks see the same file space, write operations can result in file
overwriting
- Read operations can be
affected by the file server's ability to handle multiple read requests at
the same time
- I/O that must be
conducted over the network (NFS, non-local) can cause severe bottlenecks
and even crash file servers.
![]() The
Good News:
The
Good News:
- Parallel file systems
are available. For example:
- GPFS: General Parallel
File System for AIX (IBM)
- Lustre: for Linux clusters
(Oracle)
- PVFS/PVFS2: Parallel
Virtual File System for Linux clusters (Clemson/Argonne/Ohio
State/others)
- PanFS: Panasas
ActiveScale File System for Linux clusters (Panasas, Inc.)
- HP SFS: HP StorageWorks Scalable File Share. Lustre
based parallel file system (Global File System for Linux) product from HP
- The parallel I/O
programming interface specification for MPI has been available since 1996
as part of MPI-2. Vendor and "free" implementations are now
commonly available.
- A few pointers:
- Rule #1: Reduce overall
I/O as much as possible
- If you have access to a
parallel file system, investigate using it.
- Writing large chunks of
data rather than small packets is usually significantly more efficient.
- Confine I/O to specific
serial portions of the job, and then use parallel communications to
distribute data to parallel tasks. For example, Task 1 could read an
input file and then communicate required data to other tasks. Likewise,
Task 1 could perform write operation after receiving required data from
all other tasks.
- Use local, on-node file
space for I/O if possible. For example, each node may have /tmp filespace which can used. This is usually much more efficient than
performing I/O over the network to one's home directory.
Limits and Costs of
Parallel Programming
![]() Amdahl's Law:
Amdahl's Law:
where P
= parallel fraction, N = number of processors and S = serial fraction.
|
|
- However, certain
problems demonstrate increased performance by increasing the problem size.
For example:
- 2D Grid Calculations 85 seconds 85%
- Serial fraction 15 seconds 15%
We
can increase the problem size by doubling the grid dimensions and halving the
time step. This results in four times the number of grid points and twice the
number of time steps. The timings then look like:
2D Grid Calculations 680 seconds 97.84%
Serial fraction 15 seconds 2.16%
- Problems that increase
the percentage of parallel time with their size are more scalable
than problems with a fixed percentage of parallel time.
![]() Complexity:
Complexity:
- In general, parallel
applications are much more complex than corresponding serial applications,
perhaps an order of magnitude. Not only do you have multiple instruction
streams executing at the same time, but you also have data flowing between
them.
- The costs of complexity
are measured in programmer time in virtually every aspect of the software
development cycle:
- Design
- Coding
- Debugging
- Tuning
- Maintenance
- Adhering to
"good" software development practices is essential when when working with parallel applications - especially
if somebody besides you will have to work with the software.
![]() Portability:
Portability:
- Thanks to
standardization in several APIs, such as MPI, POSIX threads, HPF and OpenMP, portability issues with parallel programs are
not as serious as in years past. However...
- All of the usual
portability issues associated with serial programs apply to parallel
programs. For example, if you use vendor "enhancements" to Fortran, C or C++, portability will be a problem.
- Even though standards
exist for several APIs, implementations will differ in a number of
details, sometimes to the point of requiring code modifications in order
to effect portability.
- Operating systems can
play a key role in code portability issues.
- Hardware architectures
are characteristically highly variable and can affect portability.
![]() Resource
Requirements:
Resource
Requirements:
- The primary intent of
parallel programming is to decrease execution wall clock time, however in
order to accomplish this, more CPU time is required. For example, a
parallel code that runs in 1 hour on 8 processors actually uses 8 hours of
CPU time.
- The amount of memory
required can be greater for parallel codes than serial codes, due to the
need to replicate data and for overheads associated with parallel support
libraries and subsystems.
- For short running
parallel programs, there can actually be a decrease in performance
compared to a similar serial implementation. The overhead costs associated
with setting up the parallel environment, task creation, communications
and task termination can comprise a significant portion of the total execution
time for short runs.
![]() Scalability:
Scalability:
- The ability of a
parallel program's performance to scale is a result of a number of
interrelated factors. Simply adding more machines is rarely the answer.
- The algorithm may have
inherent limits to scalability. At some point, adding more resources
causes performance to decrease. Most parallel solutions demonstrate this
characteristic at some point.
- Hardware factors play a
significant role in scalability. Examples:
- Memory-cpu bus bandwidth on an SMP machine
- Communications network
bandwidth
- Amount of memory
available on any given machine or set of machines
- Processor clock speed
- Parallel support
libraries and subsystems software can limit scalability independent of
your application.
Performance
Analysis and Tuning
- As with debugging,
monitoring and analyzing parallel program execution is significantly more
of a challenge than for serial programs.
- A number of parallel
tools for execution monitoring and program analysis are available.
- Some are quite useful;
some are cross-platform also.
- Some starting points:
- LC's "Supported
Software and Computing Tools" web pages at: computing.llnl.gov/code/content/software_tools.php
- A dated, but
potentially useful LC whitepaper on the subject of "High Performance
Tools and Technologies" describes a large number of tools, and a
number of performance related topics applicable to code developers. Find
it at: computing.llnl.gov/tutorials/performance_tools/HighPerformanceToolsTechnologiesLC.pdf.
- Performance
Analysis Tools Tutorial
- Work remains to be done,
particularly in the area of scalability.
|
Parallel Examples |
Array Processing
|
|
Array Processing
Parallel Solution 1
|
|
![]() One
Possible Solution:
One
Possible Solution:
- Implement as a Single
Program Multiple Data (SPMD) model.
- Master process
initializes array, sends info to worker processes and receives results.
- Worker process receives
info, performs its share of computation and sends results to master.
- Using the Fortran storage scheme, perform block distribution of
the array.
- Pseudo code solution: red highlights changes for parallelism.
|
find out if I am MASTER
or WORKER if I am MASTER initialize the array send each WORKER info on part of array it
owns send each WORKER its portion of initial
array receive from each WORKER results else if I am WORKER receive from MASTER info on part of array I
own receive from MASTER my portion of initial
array
# calculate my portion of array
do j = my first column,my
last column
do i = 1,n a(i,j) = fcn(i,j)
end do
end do send MASTER results endif |
- Example MPI Program in
C: mpi_array.c
- Example MPI Program in
Fortran: mpi_array.f
Array Processing
Parallel Solution 2: Pool of Tasks
- The previous array
solution demonstrated static load balancing:
- Each task has a fixed
amount of work to do
- May be significant idle
time for faster or more lightly loaded processors - slowest
tasks determines overall performance.
- Static load balancing is
not usually a major concern if all tasks are performing the same amount of
work on identical machines.
- If you have a load
balance problem (some tasks work faster than others), you may benefit by
using a "pool of tasks" scheme.
![]() Pool
of Tasks Scheme:
Pool
of Tasks Scheme:
- Two processes are
employed
Master Process:
- Holds pool of tasks for
worker processes to do
- Sends worker a task
when requested
- Collects results from
workers
Worker Process: repeatedly does the
following
- Gets task from master
process
- Performs computation
- Sends results to master
- Worker processes do not
know before runtime which portion of array they will handle or how many
tasks they will perform.
- Dynamic load balancing
occurs at run time: the faster tasks will get more work to do.
- Pseudo code solution: red highlights changes for parallelism.
|
find out if I am MASTER
or WORKER if I am MASTER do until no more jobs if request send to WORKER next job else receive results from WORKER end do else if I am WORKER do until no more jobs request job from MASTER receive from MASTER next job calculate array element: a(i,j) = fcn(i,j) send results to MASTER end do endif |
![]() Discussion:
Discussion:
- In the above pool of
tasks example, each task calculated an individual array element as a job.
The computation to communication ratio is finely granular.
- Finely granular
solutions incur more communication overhead in order to reduce task idle
time.
- A more optimal solution
might be to distribute more work with each job. The "right"
amount of work is problem dependent.
|
Parallel Examples |
PI Calculation
|
|
PI Calculation
Parallel Solution
|
|
- Example MPI Program in
C: mpi_pi_reduce.c
dboard.c
- Example MPI Program in
Fortran: mpi_pi_reduce.f
dboard.f
Simple Heat
Equation
|
|
Simple Heat
Equation
Parallel Solution
 Implement as an SPMD model
Implement as an SPMD model - The entire array is
partitioned and distributed as subarrays to all
tasks. Each task owns a portion of the total array.
- Determine data
dependencies
- interior elements belonging to a task are independent of
other tasks
- border elements are dependent upon
a neighbor task's data, necessitating communication.
- Master process sends
initial info to workers, and then waits to collect results from all
workers
- Worker process
calculates solution within specified number of time steps, communicating
as necessary with neighbor processes
- Pseudo code solution: red highlights changes for parallelism.
|
find out if I am MASTER
or WORKER if I am MASTER initialize array send each WORKER starting info and subarray receive results from each WORKER else if I am WORKER receive from MASTER starting info and subarray do t = 1, nsteps update time send neighbors my border info receive from neighbors their border info update my portion of solution array end do send MASTER results endif |
- Example MPI Program in
C: mpi_heat2D.c
- Example MPI Program in
Fortran: mpi_heat2D.f
1-D Wave Equation
- In this example, the
amplitude along a uniform, vibrating string is calculated after a
specified amount of time has elapsed.
- The calculation
involves:
- the amplitude on the y
axis
- i as the position index
along the x axis
- node points imposed
along the string
- update of the amplitude at
discrete time steps.
- The equation to be
solved is the one-dimensional wave equation:
- A(i,t+1) = (2.0 * A(i,t)) - A(i,t-1)
- + (c * (A(i-1,t) - (2.0 * A(i,t)) + A(i+1,t)))
where c is a constant
- Note that amplitude will
depend on previous timesteps (t, t-1) and
neighboring points (i-1, i+1). Data dependence will mean that a parallel
solution will involve communications.
1-D Wave Equation
Parallel Solution
- Implement as an SPMD
model
- The entire amplitude
array is partitioned and distributed as subarrays
to all tasks. Each task owns a portion of the total array.
- Load balancing: all
points require equal work, so the points should be divided equally
- A
block
decomposition would have the work partitioned into the number of tasks as
chunks, allowing each task to own mostly contiguous data points.
- Communication need only
occur on data borders. The larger the block size the less the
communication.
- Pseudo code solution:
|
find out number of tasks and task
identities #Identify left and right
neighbors left_neighbor = mytaskid - 1 right_neighbor = mytaskid +1 if mytaskid
= first then left_neigbor = last if mytaskid
= last then right_neighbor = first find out if I am MASTER or WORKER if I am MASTER
initialize array
send each WORKER starting info and subarray else if I am WORKER`
receive starting info and subarray from
MASTER endif #Update values for each point
along string #In this example the master
participates in calculations do t = 1, nsteps
send left endpoint to left neighbor
receive left endpoint from right neighbor
send right endpoint to right neighbor
receive right endpoint from left neighbor #Update points along line
do i = 1, npoints newval(i) = (2.0 * values(i)) - oldval(i) + (sqtau *
(values(i-1) - (2.0 * values(i)) + values(i+1)))
end do end do #Collect results and write to
file if I am MASTER
receive results from each WORKER
write results to file else if I am WORKER
send results to MASTER endif |
- Example MPI Program in
C: mpi_wave.c
- Example MPI Program in
Fortran: mpi_wave.f
|
References and More Information |
- Author: Blaise Barney,
Livermore Computing.
- A search on the WWW for
"parallel programming" or "parallel computing" will
yield a wide variety of information.
- Recommended reading:
- "Designing and
Building Parallel Programs". Ian Foster.
http://www-unix.mcs.anl.gov/dbpp/ - "Introduction to
Parallel Computing". Ananth Grama, Anshul Gupta, George
Karypis, Vipin Kumar.
http://www-users.cs.umn.edu/~karypis/parbook/ - "Overview of
Recent Supercomputers". A.J. van der Steen, Jack Dongarra.
OverviewRecentSupercomputers.2008.pdf - Photos/Graphics have
been created by the author, created by other LLNL employees, obtained from
non-copyrighted, government or public domain (such as
http://commons.wikimedia.org/) sources, or used with the permission of
authors from other presentations and web pages.
- History: These materials
have evolved from the following sources, which are no longer maintained or
available.
- Tutorials located in
the Maui High Performance Computing Center's "SP Parallel
Programming Workshop".
- Tutorials located at
the Cornell Theory Center's "Education and Training" web page.