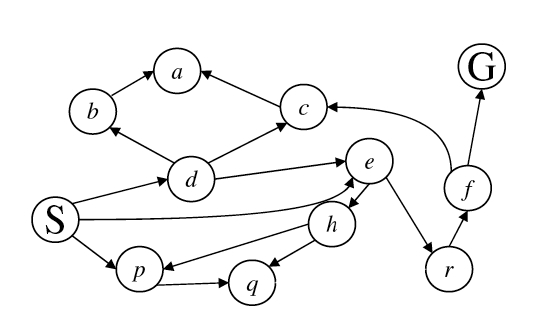
A state represents a physical configuration of the world. The states form a graph.
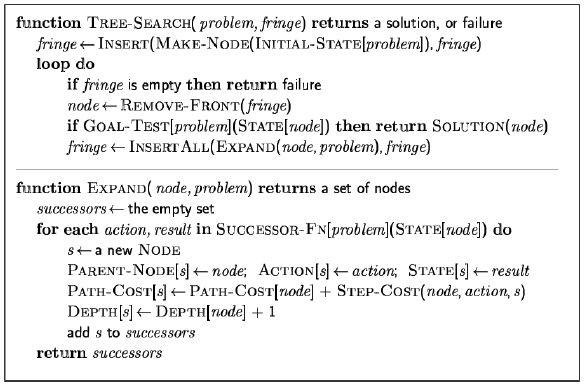
A node is a data structure that is part of a search tree. It includes state variables, a pointer to the parent node, its depth in the tree, and the path cost to reach it.
The same problem state is usually represented multiple times in the search tree, which means that one state correponds to multiple nodes.

The Expand function creates new nodes in the search tree by filling in state variables. It uses the Successor-Fn to choose which states should be expanded first. A search strategy is a particular ordering of nodes to expand.